
Présentation de la nouvelle caméra de profondeur D455 de la série Intel RealSense . Contrairement aux nouveaux produits de l'année dernière - la caméra de suivi T265 et le lidar L515 - le D455 est une caméra de profondeur classique, c'est-à-dire une continuation de la gamme d'appareils qu'Intel développe depuis près d'une décennie. Il s'agit du quatrième modèle de la famille D400 à être amélioré et révisé.
Dans le blog Intel, on parle rarement de la technologie Intel RealSense maintenant que l'on juge nécessaire de faire une brève introduction avant d'annoncer à chaque fois. Les technologies d'imagerie 3D ont été développées chez Intel depuis le début des années 2000. Le principe de fonctionnement des caméras 3D consiste en la formation simultanée de deux types d'images: une trame RVB régulière et une carte de profondeur obtenue à l'aide d'émetteurs et de capteurs infrarouges. L'image enrichie de données de profondeur peut être utilisée pour la vision par ordinateur et la robotique, les manipulations avec les objets représentés et leur analyse, ou comme interface humaine naturelle pour contrôler les systèmes informatiques à l'aide d'expressions faciales, de mouvements des mains et des doigts et de gestes.
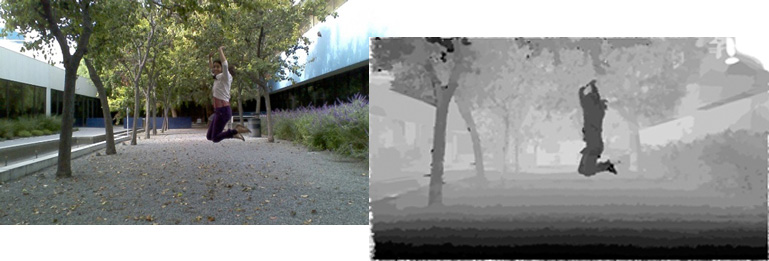
Photo RVB et carte de profondeur pour cela Intel RealSense SDK a
été publié pour fonctionner avec des caméras(la version actuelle est 2.0). À un moment donné, nous avons activement publié des traductions d'articles sur ce sujet dans le blog , il reste donc l'une des rares sources d'informations sur RealSense en russe.

Vue éclatée de la caméra Intel RealSense Depth D455
Actuellement, parmi les caméras de profondeur classiques, la famille Intel RealSense D400 est pertinente, composée de trois modèles: D415, D435 et D435i. Le D415 fournit une image plus claire, mais a une réponse plus lente et une distance minimale plus éloignée. Le D435 est plus adapté aux applications AR / VR car son obturateur global fonctionne mieux avec les sujets en mouvement rapide. Le D435i dispose d'une unité de mesure inertielle (IMU) intégrée qui ajoute des données de position et de déplacement à l'image 3D, ce qui est important pour les applications mobiles.
Avec l'ajout de nouveaux éléments, l'image globale ressemble à ceci.
| D415 | D435 / D435i | D455 | |
|---|---|---|---|
| Application | Intérieur extérieur | ||
| Détermination de la profondeur | Double faisceau infrarouge | ||
| Type d'obturateur | Glissement | Global | Global |
| Taille de pixel | 1,4 x 1,4 μm | 3 x 3 μm | 3 x 3 μm |
| Taille du champ de profondeur | 63,4 ° x 40,4 ° | 85,2 ° x 58 ° | 86 ° × 57 ° |
| Résolution du champ de profondeur | 1 280 x 720 | ||
| Paramètres de flux RVB | 1080p à 30 FPS | 1080p à 30 FPS | 1280 × 800 à 90 FPS |
| Gamme de profondeur | 0,16 à 10 m | 0,11 à 10 m | 0,4 à 20 m |
| IMU | Non | Non Oui | il y a |
| Taille de la chambre (L x P x H) | 99 x 20 x 23 mm | 90 x 25 x 25 mm | 124 x 26 x 29 mm |