Très controversé, très inhabituel, très étrange, mais ça marche! À l'intersection de l'architecture, de la robotique collaborative et des véhicules aériens sans pilote. Présentation: Tensodrone ™.

Tensodrone (Tensodron) - véhicule aérien sans pilote (UAV) de type multi-rotor d'une nouvelle conception avec protection contre les collisions, fabriqué sur le principe de la tenségrité. Cette approche améliore la résistance aux chocs avec moins de poids en combinant la cage de protection et la conception du cadre structurel.
Le projet est un exemple frappant de l'interaction de différentes équipes du Centre de Compétence NTI dans la direction des «Technologies des Composants Robotique et Mécatronique» sur la base de l'Université Innopolis.
Les drones tombent

Source
Juste parce qu'ils volent. Systèmes de contrôle, moteurs, capteurs, pilotes automatiques, ordinateurs de bord et logiciels - les développeurs essaient de faire tout cela de manière aussi fiable que possible, mais le risque de crash de l'hélicoptère demeure. Et s'il s'agit d'un prototype, vous devez immédiatement en créer plusieurs (pièces ou dizaines?) Pour le débogage. En plus des facteurs internes, évidemment, des facteurs externes subsistent: vent, obstacles passifs, influence active.
Presque personne ne discutera, les drones tombent, se heurtent, se renversent.
Vous pouvez essayer d'éviter cela, vous pouvez vous y préparer. Ce qui est mieux? Cela dépend du développeur, de l'utilisateur et du législateur.
Je suis en faveur d'utiliser les deux approches ensemble. Mais dans cet article, nous nous concentrerons sur la façon d'éviter les conséquences d'une chute ou d'une collision d'un drone.
Structures de protection
L'approche la plus simple pour éviter les conséquences d'un crash ou d'une collision d'UAV est une cage de protection et d'autres structures de protection. Il y a deux tâches ici: protéger le drone contre les dommages et protéger l'environnement dans lequel le drone fonctionne et les personnes qui s'y trouvent contre le drone.
La version de base de la conception, qui est plus susceptible de protéger les gens du drone, est la protection d'hélice.

Drone AR.Drone 2.0 avec protections d'hélice. Source
Il existe également des solutions amusantes inspirées de l'origami avec des protections d'hélice flexibles pliables (et même des conceptions de cadre) développées par l'équipe du professeur Dario Floreano à l'EPFL.
La conception dominante pour protéger le drone lui-même (et en même temps les personnes contre lui) est une cage de protection. Le quadricoptère lui-même est à l'intérieur de la cage.
DroneTrèfle du COEX russe La
société russe COEX fabrique des drones à des fins de formation, qui ont par défaut des gardes d'hélice et, en option, une cage de protection.
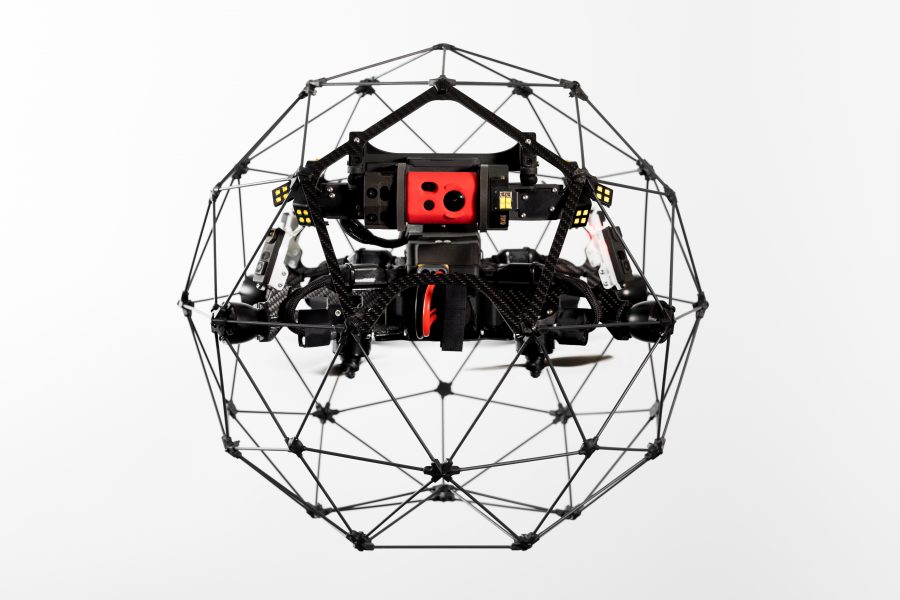
Drone Flyability ELIOS
Swiss (Suisse - la capitale dronostroeniya?) Flyability Company - produit peut-être l' hélicoptère ELIOS le plus commercialisé avec une cage de protection pour effectuer des inspections à l'intérieur des locaux. L'originalité du design consiste à fixer la cage de protection au châssis de l'hélicoptère sur une suspension mobile avec possibilité de stabilisation.

Drone Dronistics
La startup Dronistics de l'EPFL (encore une fois en Suisse, du groupe Dario Floreano) propose un drone à cage pliable pour la livraison en toute sécurité des marchandises.
Pause encore

L'inconvénient de ces drones est l'augmentation du poids de la structure - vous devez emporter avec vous une cage de protection et des accessoires pour le drone. Le désir de réduire le poids de la structure de protection conduit à une diminution de sa résistance.
Drones à géométrie variable
Une autre direction liée à l'idée d'un drone robuste (et pas seulement) est le pliage des drones et des drones à géométrie variable (pliable et morphing). Cela fait référence à la capacité du drone à modifier sa géométrie en vol. Des structures pliables sont fabriquées afin d'éviter d'endommager le drone (par exemple, le drone peut «se froisser» avant l'impact), et le drone peut, par exemple, être plié à une taille compacte pour voler à travers des fenêtres étroites.
Vous avez peut-être vu une vidéo sympa d'un drone à géométrie variable de Suisse (oui, encore une fois ETH + EPFL + UZH). Cette idée est également intéressante et proche de nous, je vous dirai pourquoi plus tard.
Drone à géométrie variable
Tenségrité
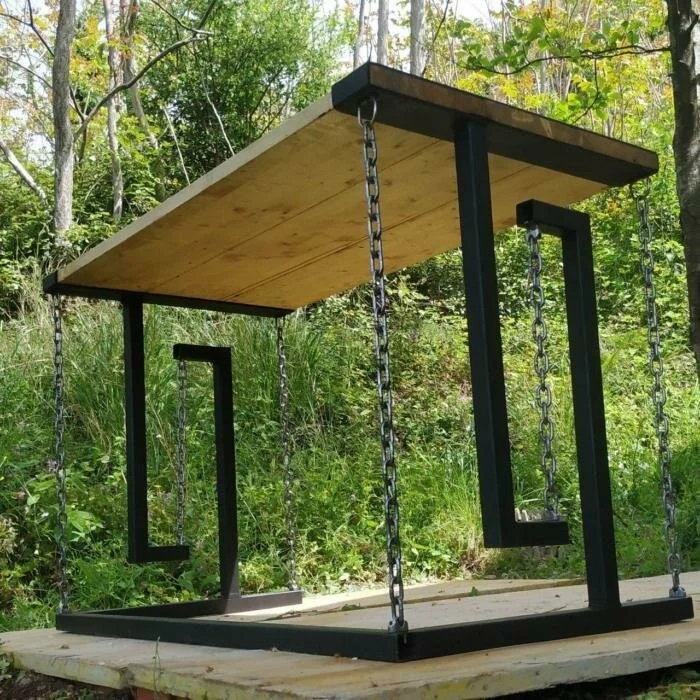
Table de tenségrité. La source de la
tenségrité est la capacité des structures d'encadrement à exploiter les interactions d'éléments solides compressifs avec des composites de traction pour garantir que chaque élément fonctionne avec une efficacité et une économie maximales ( Wiki ). Le terme est relativement nouveau, apparu dans les années 1960. La table de l'image ci-dessus se tient (ou se bloque) sans pieds simplement en raison du principe de tenségrité.
Il existe de nombreuses applications modernes de cette approche en architecture, d'où elle est apparue, principalement dans la conception de ponts.

Le plus grand pont de tenségrité au monde, en Australie. Une source
Utilisations alternatives :)
Tenségrité en robotique
L'un des domaines les plus anciens de la robotique - les manipulateurs industriels - connaît aujourd'hui une nouvelle étape de son développement associée au soi-disant. robotique collaborative. Dans le discours des spécialistes dans ce domaine, deux termes peuvent être entendus avec une grande fréquence - rigidité et compliance.
En robotique industrielle, le terme conformité fait référence à la flexibilité et à la conformité. Un robot rigide et non conforme est un appareil qui fonctionne quelles que soient les forces externes qui agissent sur lui. L'effecteur d'extrémité du robot suivra exactement le même chemin à chaque fois. D'un autre côté, l'effecteur terminal d'un robot conforme peut se déplacer le long de différentes trajectoires pour accomplir une tâche et appliquer différentes forces à l'objet. Par exemple, un robot peut attraper un œuf sans l'écraser. La rigidité contrôlée est au cœur de la robotique collaborative.
Les idées d'utilisation de la tenségrité en robotique sont issues de la robotique collaborative et «douce». Les structures de tenségrité sont légères, résistantes aux chocs et permettent de contrôler leur rigidité (compliance) et leur configuration (forme).
L'exemple le plus célèbre de l'application de la tenségrité en robotique est le Super Ball Bot de la NASA, un robot terrestre pliable, qui devait être utilisé pour explorer les surfaces planétaires. Grâce à la structure sphérique des câbles et des câbles, le robot peut résister à une chute de grande hauteur lorsqu'il est largué sur la planète depuis un vaisseau spatial. Une fois en surface, le robot peut rouler dans n'importe quelle direction en contrôlant les longueurs des câbles et / ou des tiges.
Vidéo IEEE Spectrum sur NASA SUPERball v2
Robots de tenségrité à l'Université Innopolis
Chez UI, nous développons un appareil mathématique pour la modélisation, la conception et le contrôle de systèmes robotiques avec des structures couplées aux contraintes avec une rigidité variable (c'est la tenségrité). C'est un travail fondamental que l'on retrouve dans une grande variété de robots, tels que les manipulateurs de tenségrité ou les robots marcheurs.
Oleg Balakhnov
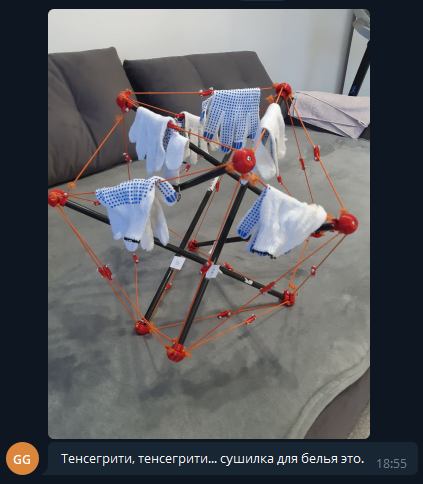
Oleg, manipulateur de tenségrité et chercheur diplômé de l'UI, a été le premier à commencer à prototyper des robots de tenségrité ici - d'abord à partir de bâtons en bois et d'élastiques. La photo de la construction de bâtonnets de sushi, peut-être, garde aussi l'histoire des discussions.
Vibrobot de tenségrité
-
-
Effet synergique

Vous l'avez probablement déjà
J'ai un drone, j'ai de la tenségrité. Pouah! (Tensodrone)
Une fois dans notre garage, je suis passé devant un design étrange accrocheur:
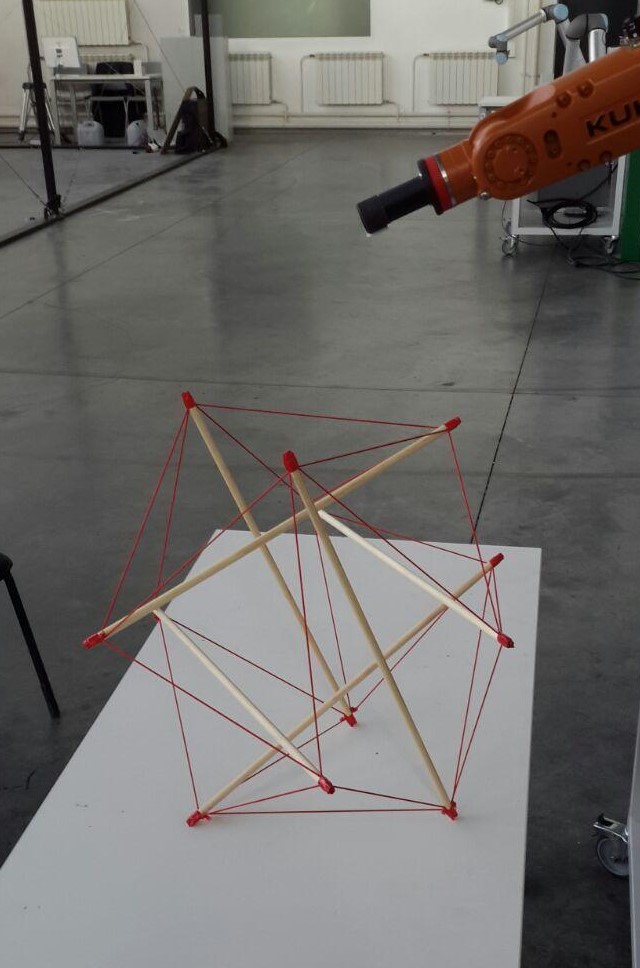
j'ai demandé: "Qu'est-ce que c'est?" On m'a dit: "une structure impossible à tuer - laissez-la tomber, mais elle ne se brise pas".
Je me suis cassé (en fait juste ratatiné - j'ai changé de forme parce que les élastiques étaient lâches et mal alignés). Mais nous avons besoin d'un tel design pour les drones! Et nous avons commencé une expérience aventureuse.
Vidéo du test de survie de tenségrité
Un test plus difficile
Squishy robotics — , - , ,
Squishy robotics — , - , ,
Aventure

Sergey approuve l'expérience aventureuse. Jeff Bezos est également
Sergei Savin - un chercheur senior, professeur agrégé, un scientifique sérieux avec un doctorat en 25 ans et de nombreuses publications de notation. Il est l'un des pères fondateurs de Tensegrity Robotics chez UI, et a reçu plusieurs subventions pour développer Tensegrity in Robotics.
Igor réfléchit à une idée
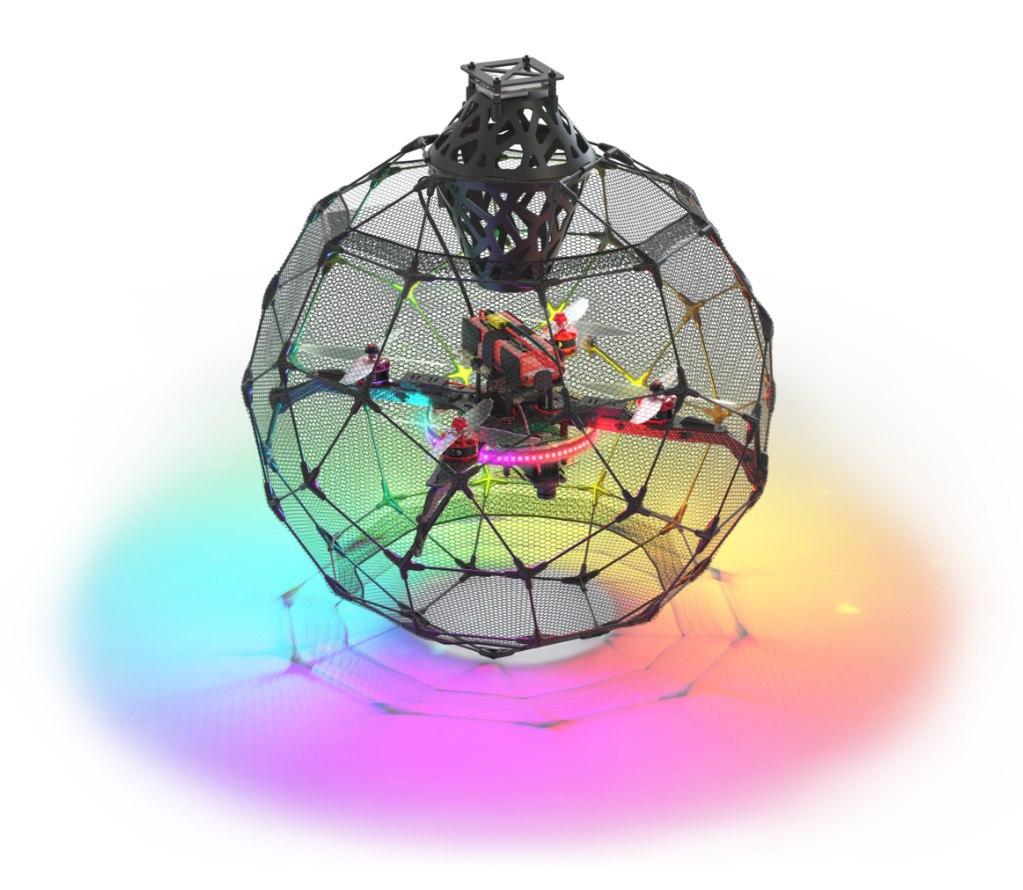
Dmitry, Oleg et Haney récupèrent le premier tencodron (ça ressemble à quelque chose). Dmitry DevittGigaFlopsis- un chercheur et étudiant de troisième cycle de l'Université et celui qui a appliqué les technologies les plus modernes - tubes de carbone et fils de kevlar, impression 3D avec du carbone et du plastique souple, a tout mis en œuvre et l'a fait voler.

Le processus d'assemblage du tensodron

Ura. arrivé!
Mouches!
Dmitry est également le premier acteur après le tensodron dans les vidéos épiques de ses vols. Taux:
Un jeu de deux acteurs se mettant en vedette. Vidéo par DeluuusiOn
En savoir plus sur la construction de prototypes
La conception du premier prototype de drone s'est avérée comme suit:
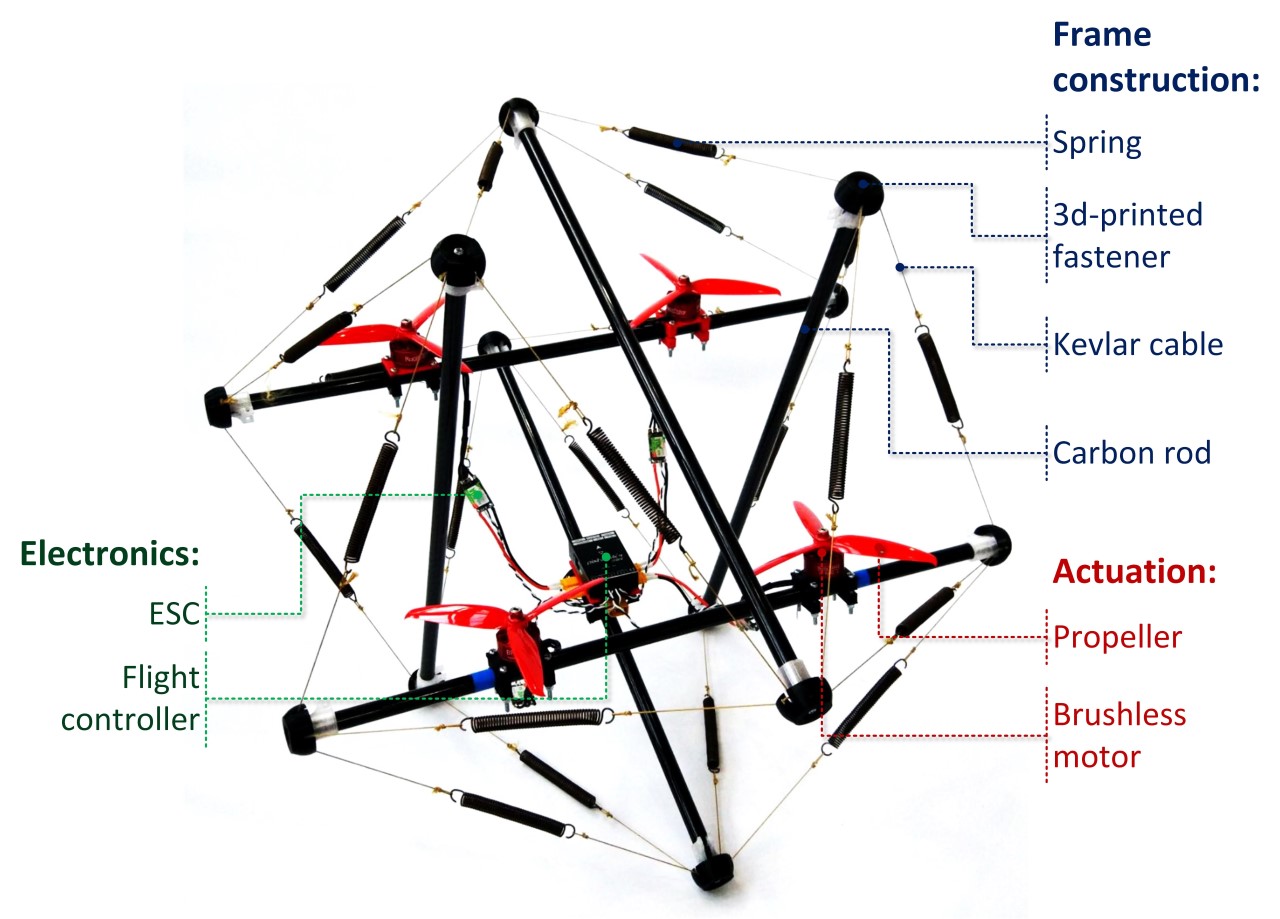
La conception du prototype du tensodron de l'Université Innopolis La conception de
base à six tiges de Tensegrity a été utilisée. Contrairement aux quadricoptères rigides, nous avons deux paires de moteurs à hélices montées sur des poutres différentes. De plus, aucun d'entre eux n'est relié rigidement au pilote automatique, qui est situé sur la poutre inférieure.
L'électronique embarquée et les composants électromécaniques du prototype de drone comprennent:
- Pilote automatique CUAV Pixhawk v5 mini;
- Batterie 3s 1400mAh;
- Régulateur ESC Racerstar REV35 35A BLheliS 3-6S;
- Moteurs Racerstar Racing Edition BR2205 2300KV;
- Capteurs IMU MPU9250.
Les câbles sont en fibre Kevlar avec des ressorts personnalisés. Les tiges sont fabriquées à partir de tubes en fibre de carbone. Les embouts et autres petites pièces sont imprimés en 3D.
Problèmes de gestion
Le principal problème de contrôle par rapport à un drone dur conventionnel réside dans les vibrations, qui, d'une part, sont plus importantes en amplitude, et d'autre part, elles sont différentes pour le contrôleur et les différents moteurs, car ils sont installés sur des poutres différentes (bien que cela puisse également être un plus - isolation contre les vibrations).
Premiers tests de suspension Tensodron: Vibration (désolé pour la vidéo verticale)
Premiers tests du tensodron en vol: vibration
Nous ne sommes pas seuls
, .
( ), , Imperial College London:
, : — .
.. , , , .
, , :
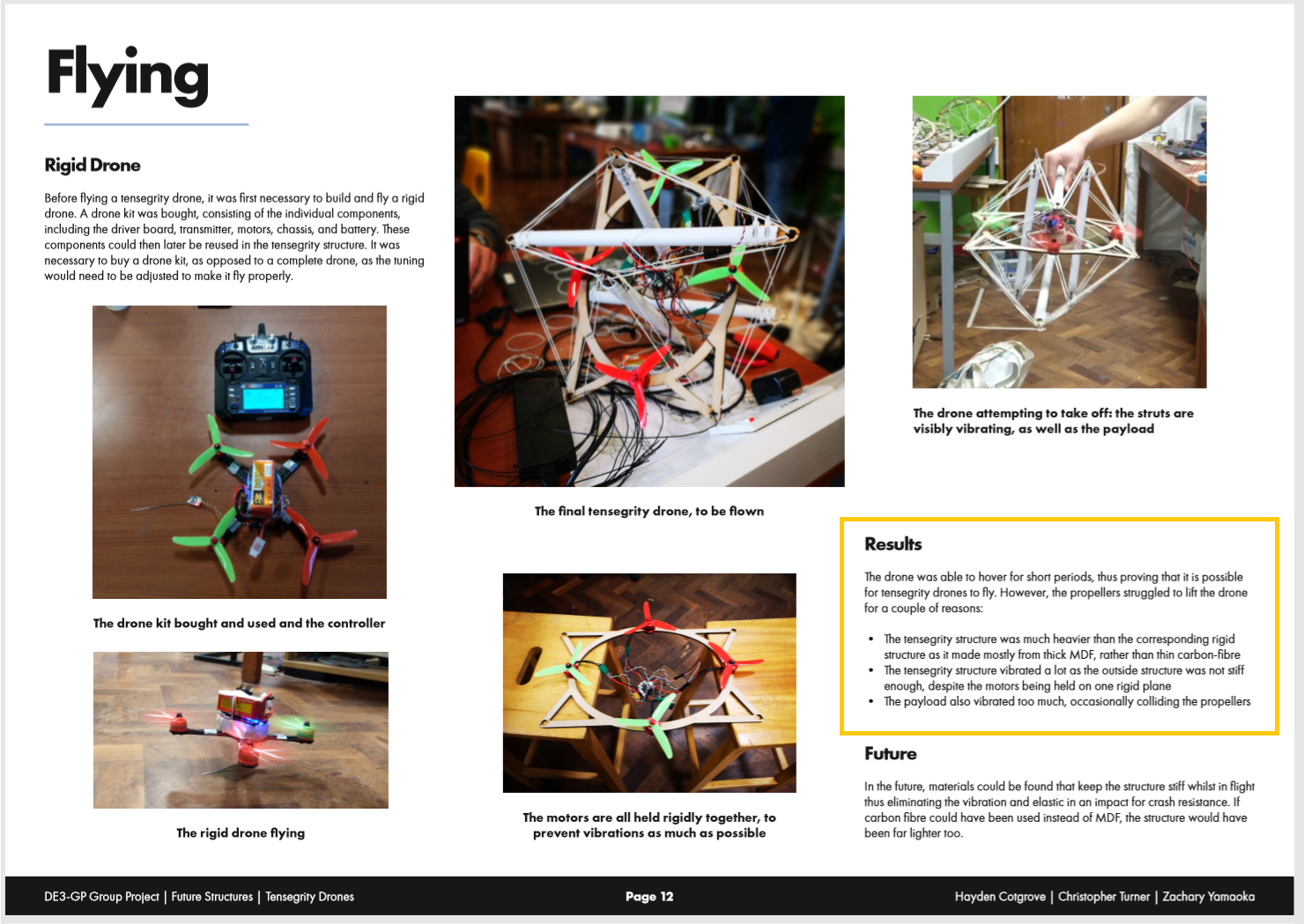
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
Nous résolvons ces problèmes de deux côtés - en améliorant la conception pour réduire les vibrations pendant le vol et en développant des algorithmes de contrôle et d'estimation d'état afin de supprimer les vibrations et un meilleur contrôle, y compris en tenant compte des données supplémentaires des capteurs IMU sur les faisceaux et d'un modèle dynamique de la structure de tenségrité.
Chute au sol suivie d'un décollage, à l'intérieur (sans montage)
Quelques vidéos de test supplémentaires
, , . , .. .
( )
( )
Et après?
Recherche
Il reste encore beaucoup de choses intéressantes à faire:
Application
Maintenant, cette chose vole d'elle-même sur une mission donnée (y compris le GPS dans la rue et à l'intérieur - nous utiliserons l'odométrie visuelle). Pour nous, une demande supplémentaire d'inspection des locaux est évidente.
À l'exception du contrôle et de la forme de bas niveau, le tensodron est un drone régulier, nous y intégrons nos algorithmes de planification de mouvement pour une exploration autonome et l'évitement d'obstacles.
Un exemple de réalisation d'une inspection automatique. Projet de master de Victor Massague, notre diplômé et dans un proche avenir, espérons-le un employé de Barcelone
Et encore des recherches
Le potentiel de la conception du drone Tensegrity est bien plus grand qu'un simple drone.
Vous vous souvenez du drone pliable de la vidéo ci-dessus? Et le SUPERball ?
Ainsi, si vous modifiez activement les longueurs des tiges ou la tension des câbles du drone de tenségrité, vous pouvez contrôler sa configuration (ou, plus simplement, la forme)!
Il s'avère Tensodrone Morphing Pliable. Nous menons activement des recherches dans ce domaine.
Tensodron à géométrie variable de l'Université Innopolis (Concept)

L'utilisation de la tenségrité pour un avion ouvre de nouveaux défis de recherche. Le prototype de conception montre déjà que l'idée fonctionne et peut être utilisée pour protéger le drone.