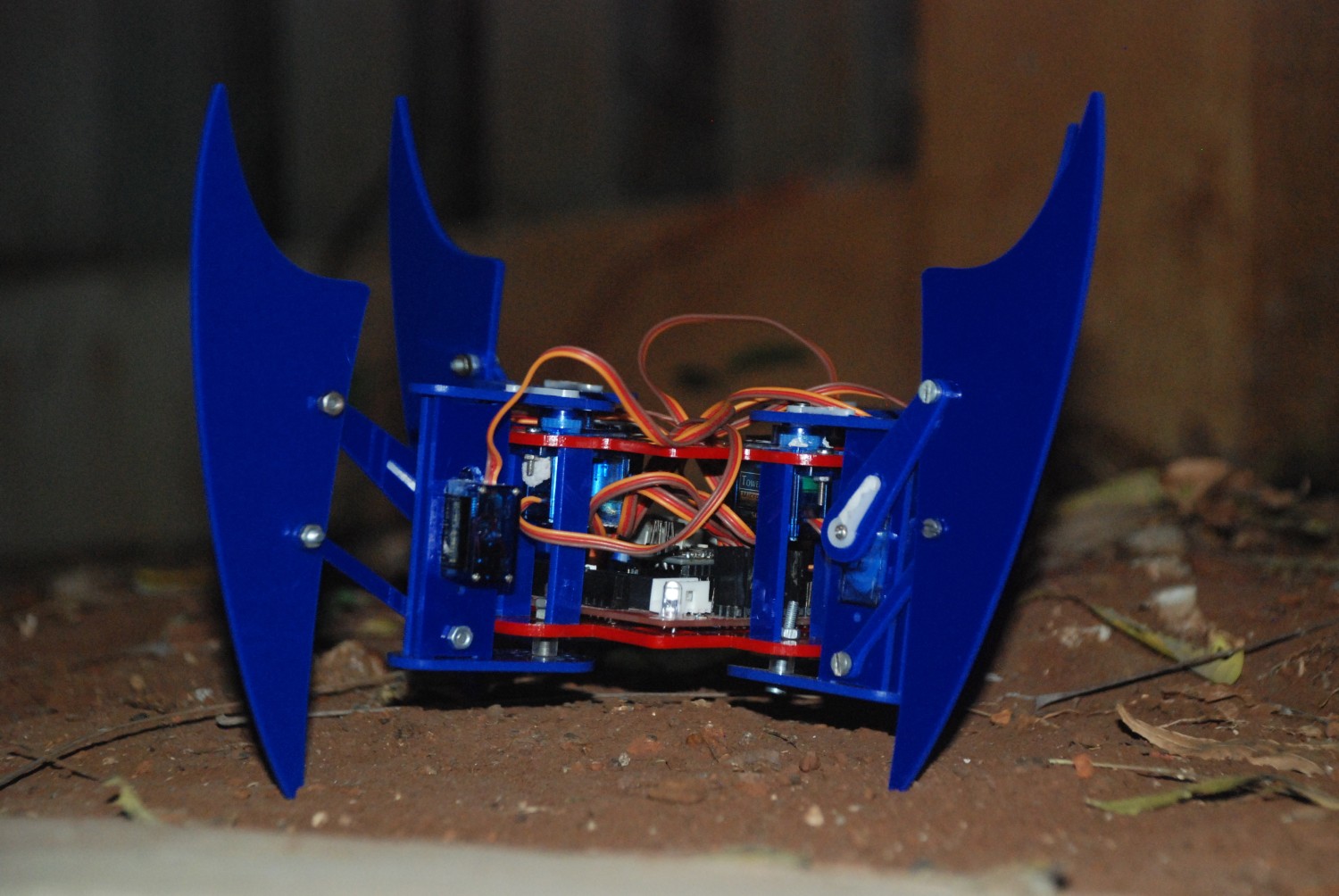
Miles est un robot araignée basé sur Arduino Nano qui utilise 4 jambes pour marcher et manœuvrer. 8 servomoteurs SG90 / MG90 sont utilisés comme entraînements de jambe. Une carte spécialement conçue vous permet de contrôler et d'alimenter les moteurs et l'Arduino Nano. La carte a des emplacements spéciaux pour les modules IMU, Bluetooth et un capteur infrarouge, ce qui donne au robot une autonomie. Le corps est assemblé à partir de plexiglas de 2 mm d'épaisseur découpé sur un cutter laser, mais il peut également être imprimé sur une imprimante 3D. Un excellent projet pour les passionnés apprenant la cinématique inverse en robotique.
Inspiré du projet mePed (www.meped.io), et utilise du code basé sur celui-ci.


Matériaux
Composants:
- Frais (1)
- Composants Miles pour l'assemblage du corps.
- Servomoteurs SG90 / MG90 (12)
- Aduino Nano (1)
- Régulateur de tension LM7805 (6)
- Commutateur (1)
- Condensateur électrolytique 0.33uF (2)
- Condensateur électrolytique 0.1uF (1)
- Connecteur Phoenix 3,08 mm 2 broches (1)
- Connecteurs mâles pour servomoteurs.
Optionnel:
- Connecteur 2 broches Relimate (1)
- Connecteur Relimate 10 broches (1)
- Connecteur 4 po Relimate (1)
Étape 1:

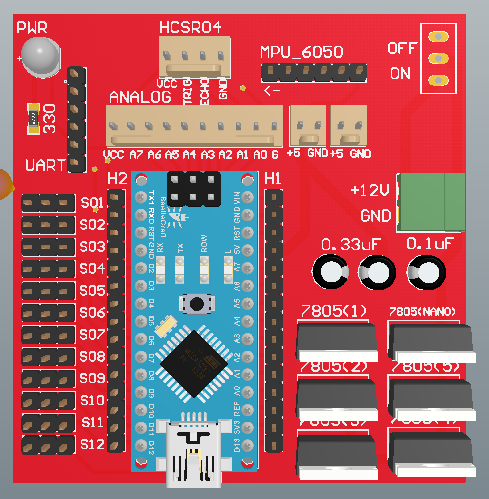

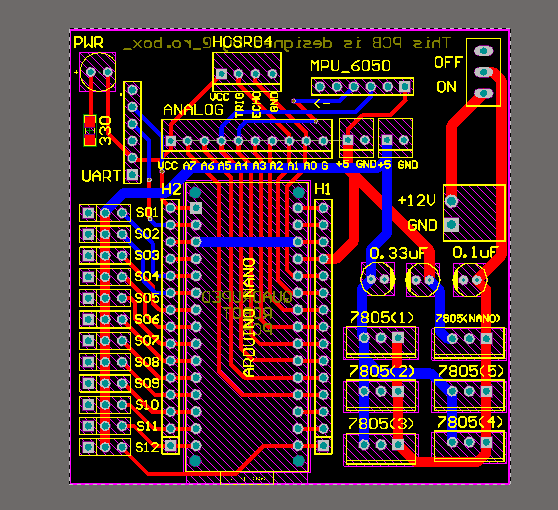
conception de schémas et de cartes Je conçois mes cartes dans Altium . 12 servomoteurs SG90 / MG90 peuvent tirer jusqu'à 4-5A lorsqu'ils fonctionnent simultanément, le circuit doit donc être capable de gérer des courants élevés. J'ai utilisé des régulateurs de tension 7805 pour alimenter les moteurs, mais chacun d'eux peut fournir un maximum de 1 A. J'ai donc connecté 6 LM7805 en parallèle, augmentant le courant de sortie disponible.
Téléchargez les schémas et les fichiers Gerber à partir du lien .
Caractéristiques du régime:
- Les MPU6050 / 9250 sont utilisés pour mesurer les angles.
- Courant de sortie jusqu'à 6 A.
- Alimentation servo isolée.
- Sortie pour capteur à ultrasons HCsr04.
- Il existe des périphériques pour Bluetooth et I2C /
- Relimate possède tous les contacts analogiques pour capteurs et actionneurs.
- Sorties de 12 servomoteurs.
- Témoin LED.
Caractéristiques de la planche:
- 77 × 94 mm.
- 2 couches FR4.
- 1,6 mm.
Étape 2: souder les composants et charger le code

Souder les composants au fur et à mesure qu'ils grandissent et commencer avec des dispositifs de montage en surface.
Dans mon circuit, il n'y a qu'une seule résistance TMP. Ajoutez des broches femelles à l'Arduino et au LM7805 afin qu'elles puissent être modifiées au besoin. Souder les broches mâles aux connecteurs du moteur.
Le circuit utilise une alimentation 5V, distincte pour les moteurs et l'Arduino. Vérifiez les courts-circuits à la terre sur tous les rails d'alimentation - sortie Arduino 5V, sortie moteur VCC et entrée 12V Phoenix.
Après avoir vérifié la carte, vous pouvez programmer l'Arduino. J'ai posté le code de test sur Github . Remplissez-le et assemblez le robot.
Étape 3: assemblage du boîtier

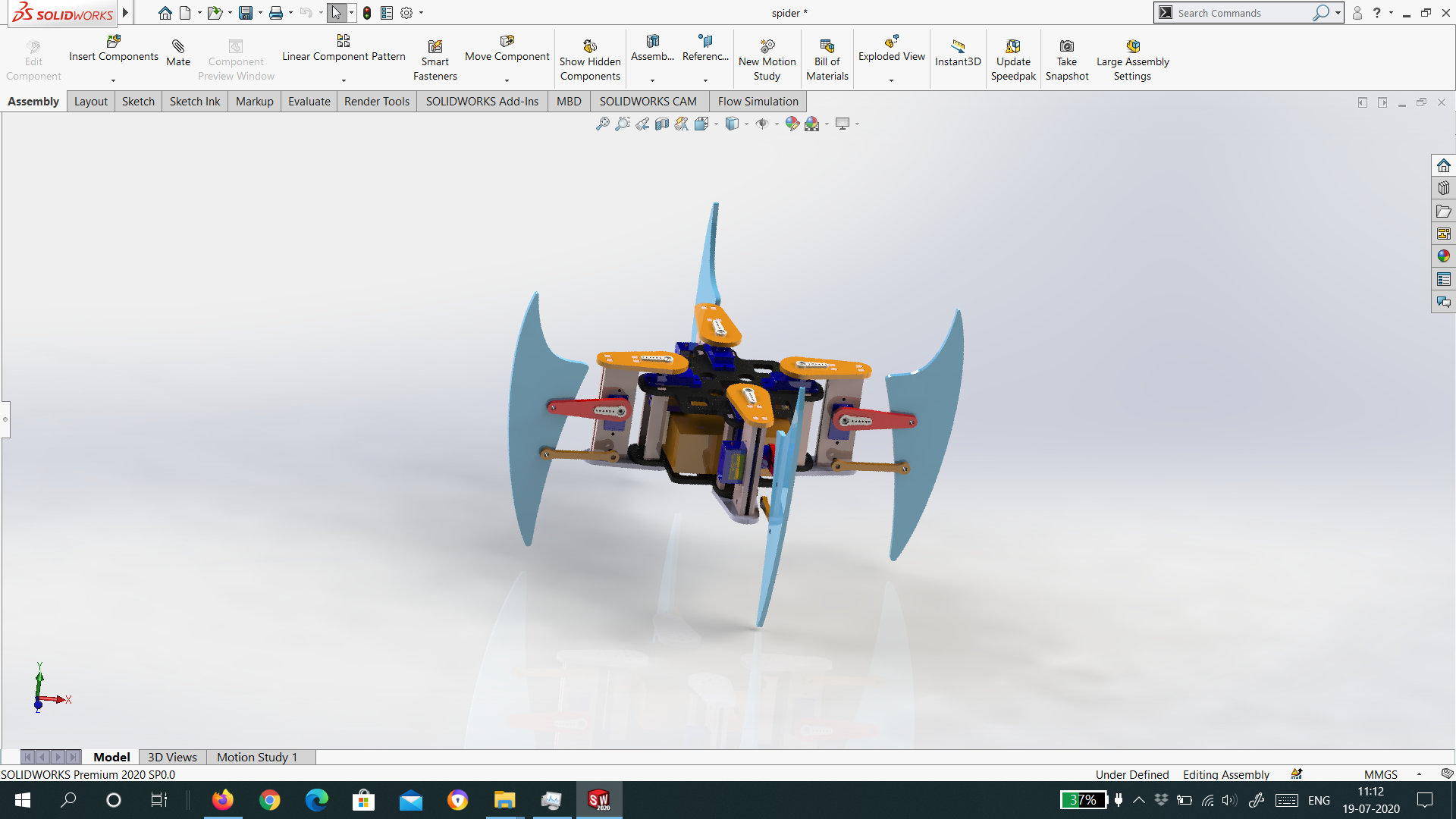
Au total, le robot se compose de 26 pièces, qui peuvent être imprimées sur une imprimante 3D ou découpées dans du plexiglas de 2 mm. J'ai utilisé des feuilles de plexiglas rouge et bleu de 2 mm pour faire ressembler le robot à Spiderman.
Il y a plusieurs connexions dans le corps qui peuvent être fixées à l'aide de boulons et d'écrous M2 et M3. Les servomoteurs sont fixés avec des boulons M2. Installez les piles et la carte avant de visser le couvercle.
J'ai téléchargé les fichiers nécessaires sur Github .
Étape 4: connexion et test
Connectez-vous dans l'ordre suivant:
- Moteur rotatif avant gauche.
- Moteur de levage avant gauche.
- Moteur de rotation arrière gauche.
- Moteur de levage arrière gauche.
- Moteur pivotant arrière droit.
- Moteur de levage arrière droit.
- Moteur de rotation avant droit.
- Moteur de levage avant droit.
Démarrez le robot en faisant glisser l'interrupteur.
Étape 5: améliorations futures
Cinématique inverse
Le code actuel utilise une approche positionnelle - nous définissons les angles que les moteurs doivent tourner pour effectuer un certain mouvement. La cinématique inverse permettra au robot de marcher de manière plus sophistiquée.
Contrôle Bluetooth
Le connecteur UART sur la carte vous permet de connecter un module Bluetooth, par exemple, HC-05, pour contrôler le robot sans fil depuis un smartphone.