
La peau n'est pas seulement le plus grand organe de notre corps, mais aussi le plus grand système sensoriel, chaque seconde recueillant des informations sur les stimuli externes et les niveaux de leur impact sur notre corps. D'un point de vue mécanique, la reconstruction de la peau humaine n'est pas si difficile, mais ce ne sera qu'une couche protectrice artificielle dépourvue d'activité neuronale. Des scientifiques de la Royal Melbourne University of Technology (Melbourne, Australie) ont mis au point un système de capteurs artificiels qui imitent divers capteurs de la peau humaine. Que fallait-il pour créer une imitation aussi complexe, quel est le principe de fonctionnement de l'appareil, quels stimuli peut-il percevoir, et où ce développement peut-il être appliqué? Nous trouverons des réponses à ces questions et à d'autres dans le rapport des scientifiques. Aller.
Base de recherche
Le système sensoriel de la peau humaine peut être divisé en plusieurs sous-systèmes, dont chacun est responsable de certains stimuli. Les récepteurs les plus courants et les plus importants sont les récepteurs de pression (corpuscules de Pacini), de température (thermorécepteurs) et de douleur (nocicepteurs).
Chacun de ces récepteurs recueille des informations et transmet des signaux au cerveau humain pour le traitement et la prise de décisions appropriées. D'autres systèmes sensoriels (vision, audition, goût, odorat) ont un principe de fonctionnement similaire.
Il est logique qu'un tel système biologique soit extrêmement difficile à reproduire, même en prenant en compte les capteurs tactiles modernes et CMOS (structure complémentaire métal-oxyde-semi-conducteur).
Il existe des développements qui implémentent un nocicepteur artificiel basé sur un memristor de diffusion *, qui peut présenter un état normal consistant en un stade de stress et de relaxation du nocicepteur, ainsi qu'un état anormal avec allodynie * et hyperalgésie * du nocicepteur utilisant des stimuli externes comme stress.
Memristor * est un élément passif en microélectronique capable de changer sa résistance en fonction de la charge qui le traverse.
L'allodynie * est une douleur anormale causée par un irritant qui n'est généralement pas douloureux (comme une douleur au toucher).Selon les scientifiques, ces développements sont extrêmement importants, car le mécanisme de commutation du memristor dépend des filaments conducteurs, qui ont un diamètre approximativement subnanométrique. En utilisant un module thermoélectrique et un module de pression piézoélectrique, il est possible d'atteindre avec succès un état de tension et de relaxation parmi les quatre fonctions principales du nocicepteur.
Hyperalgésie * - une sensibilité anormalement élevée du corps aux stimuli douloureux.
Pour le moment, une technique similaire est utilisée pour créer un œil artificiel, mais sa mise en œuvre sous forme de peau artificielle n'a pas encore été réalisée.
Dans ce travail, les scientifiques démontrent un prototype fonctionnel de récepteurs électroniques artificiels qui imitent le petit corps, le thermorécepteur et le nocicepteur de Pacini. Ceci a été réalisé grâce à une combinaison de plusieurs composants fonctionnels:
- memristor pour la prise de décision à base de titanate de strontium SrTiO3 (STO) avec déficit en oxygène;
- Capteur de pression à base d'or élastomère de traction (polydiméthylsiloxane, c'est-à-dire PDMS);
- déclenchement de température basé sur l'oxyde de vanadium (VO 2 ) avec changement de phase.
La principale différence entre ce concept et les précédents est qu'il n'y a pas besoin de modules thermoélectriques séparés et complexes et de capteurs de pression piézoélectriques pour la mise en œuvre pratique des somatosensors. Par conséquent, le développement utilise des films d'oxyde minces extrêmement peu coûteux et facilement disponibles, ainsi que des capteurs de pression portables sur un PDMS biocompatible.
Résultats de recherche
Avant de créer quoi que ce soit, vous devez réfléchir à quoi et comment fonctionnera dans la version finale. Dans le but de créer des récepteurs cutanés artificiels, une base hypothétique a été développée pour la mise en œuvre de corps fonctionnels de Pacini, de thermorécepteurs et de nocicepteurs (schéma ci-dessous).

Image # 1
Les somatosenseurs humains sont connectés par les cornes spinales (saillies de matière grise) à la moelle épinière, qui transmet des informations au cerveau ( 1a ). Il existe des méthodes spéciales pour déterminer la pression (bleu à 1a ) et la température (rouge à 1a ).
Les corps de Pacini sont des couches de membranes remplies de fluide. Les empreintes digitales sont un excellent exemple du petit corps de Pacini. Lorsqu'une pression locale est appliquée sur le corps, une partie du corps se déforme, provoquant un déplacement des ions chimiques (par exemple, sodium ou potassium) et, par conséquent, un potentiel de récepteur apparaît aux terminaisons nerveuses de la peau. Ce potentiel récepteur, lorsqu'une énergie suffisante (seuil) est atteinte, génère une impulsion électrique à l'intérieur du corpuscule, qui traverse le système nerveux central pour activer une réponse motrice via les fibres nerveuses (bleu en 1a ).
Lorsque la température cutanée dépasse 30 ° C, le thermorécepteur détecte la chaleur et déclenche des potentiels d'action. La fréquence d'excitation augmente avec l'augmentation de la température du stimulus jusqu'à ce qu'elle atteigne la valeur de saturation. De plus, les nocicepteurs de chaleur qui captent les signaux de douleur commencent à se déclencher à environ 45 ° C. Ces cellules se spécialisent dans la détection de la chaleur nocive et des brûlures.
Lorsqu'un stimulus nocif est reçu par un neurone thermique situé à une terminaison nerveuse libre, une réponse électrique est envoyée au nocicepteur pour comparer si l'amplitude du stimulus franchit le seuil pour générer un potentiel d'action et l'envoyer au système nerveux central via la moelle épinière (rouge en 1a ).
Pour créer des récepteurs artificiels similaires, des transducteurs de pression en or et PDMS ont été utilisés qui commutent entre les états de faible résistance (LRS) et de haute résistance (HRS) avec et sans pression appliquée pour simuler les corpuscules de Pacini ( 1b et 1c ).
Pour imiter le comportement des thermorécepteurs et des nocicepteurs, une transition de phase VO 2 a été utilisée , qui peut passer de HRS à température ambiante à LRS à des températures supérieures à la température de transition (68 ° C).
De plus, la mémoire à commutation résistive STO (titanate de strontium) a été utilisée comme élément décisionnel pour évaluer les niveaux de seuil.
Pour un corps de Pacini artificiel, lorsqu'il n'y a pas de pression détectable, le courant traversant le memristor de décision (I 1 ) est insuffisant en raison de la tension de polarisation pour initier la réponse du moteur ( 1b ). Lorsque la pression est appliquée, le transmetteur entre en mode HRS, bloquant I 2 , permettant au courant maximum de circuler à travers le memristor. En raison de I 1 plus élevé , le memristor basé sur STO bascule sur le LRS. Par conséquent, un courant plus élevé traverse le corps, provoquant une réaction motrice ( 1c ).
Dans le cas du thermorécepteur et du nocicepteur VO 2peut démontrer un changement de résistance de trois à quatre ordres de grandeur à la température de jonction. Si la température est inférieure à la température de jonction, alors VO 2 est un isolant.
Ainsi, une petite quantité de courant traverse le récepteur, et la tension qui apparaît sur le memristor ne suffit pas à l'allumer ( 1d ). Lorsque la température de jonction est atteinte, VO 2 bascule sur le LRS, à la suite de quoi un potentiel plus élevé apparaît sur le memristor, ce qui le fait basculer sur le LRS. Lorsque VO 2 et STO sont tous les deux dans le LRS, un courant accru circule à travers le récepteur ( 1e ).
Corps artificiel de Pacini
Après avoir créé le concept du futur appareil, les scientifiques ont commencé une mise en œuvre progressive. La première étape a été la création d'un corps artificiel de Pacini, pour lequel un memristor basé sur un STO déficient en oxygène avec une structure empilée a été utilisé: Pt (100 nm) / Ti (10 nm) / STO (55 nm) / Pt (25 nm) / Ti (7 nm) et un substrat SiO 2 .
La couche inférieure de Ti est utilisée comme couche adhésive de la couche inférieure de Pt, et la couche supérieure de Ti est utilisée comme réservoir d'oxygène et également comme couche adhésive de la couche supérieure de Pt. La couche inférieure de Pt participe au processus de commutation, tandis que la couche supérieure sert de matériau inerte qui empêche le TiO 2 d'être exposé à l'oxygène ambiant.
L'architecture du transducteur de pression est inspirée du corpuscule biologique de Pacini, de forme hélicoïdale avec une largeur de piste de 100 microns. Le diamètre de la bobine entière est de 7,8 mm. Pour créer un capteur, Au (200 nm) / Cr (20 nm) a été déposé sur un PDMS d'une épaisseur de 300 µm.
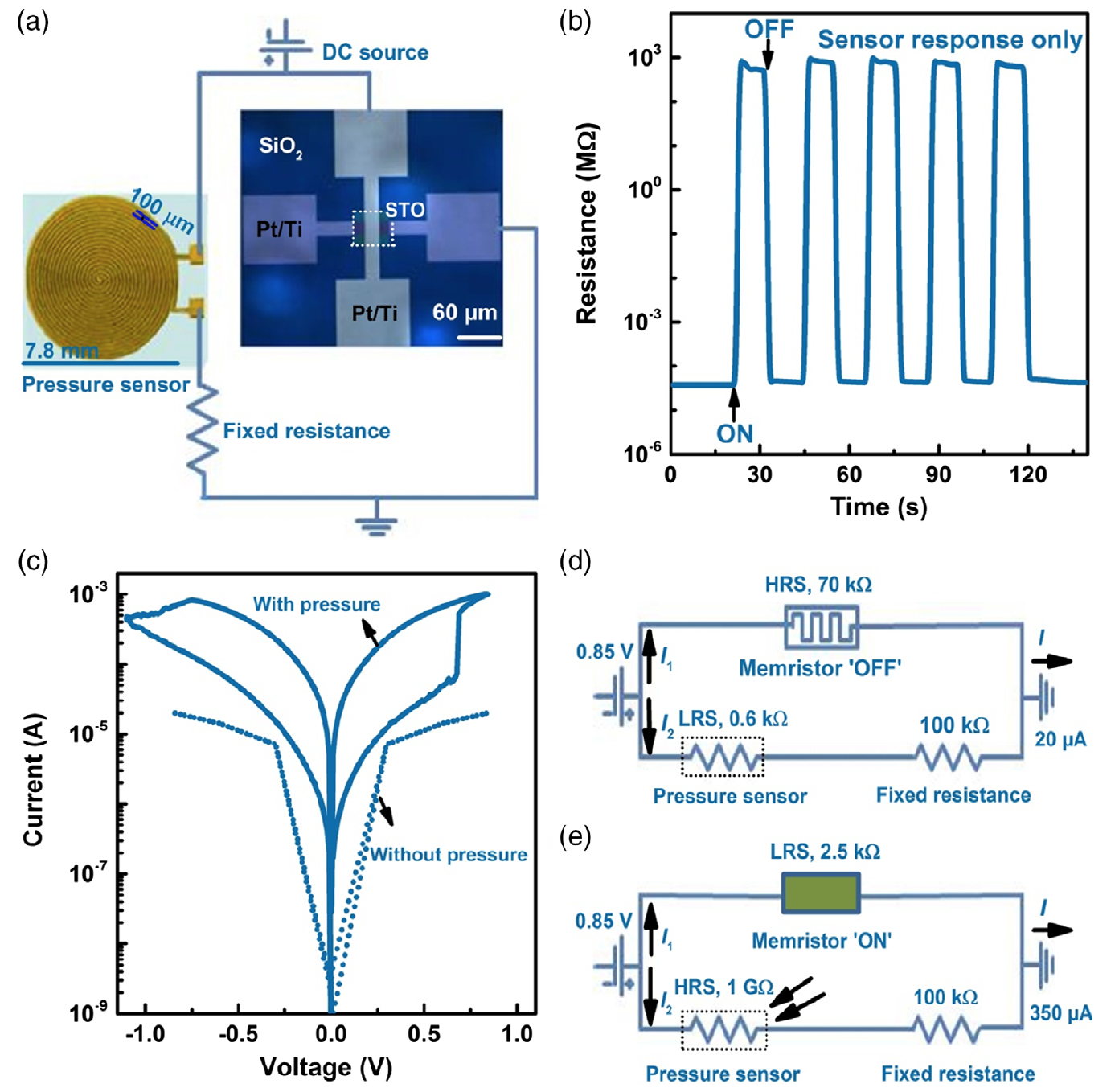
Image # 2 L'
image 2a montre un équivalent artificiel d'un veau avec l'intégration d'un memristor et d'un capteur de pression.
Le réseau de capteurs de pression fonctionne de manière à permettre au récepteur d'activer le memristor, qui agit comme un élément décisionnel.
Dans les systèmes biologiques, lorsqu'un potentiel de récepteur suffisant est atteint, le composant décisionnel peut créer une impulsion électrique pour activer le moteur du système nerveux central. Pour reproduire cette fonction avec une valeur de seuil spécifique, le capteur de pression doit détecter une plage spécifique de valeurs de pression. Pour simplifier la démonstration de l'efficacité du système, les scientifiques ont décidé de simplifier ce point à deux valeurs seulement: il y a une forte pression et il n'y a aucune pression du tout.
Une résistance fixe de 100 kΩ a été choisie pour limiter le courant traversant le réseau de capteurs de pression, qui a une résistance de seulement 0,6 kΩ. Cela garantit que le système affiche un courant très faible en l'absence de pression. Figure 2bmontre la réponse et la répétabilité d'un transducteur de pression autonome.
Lorsque la pression est appliquée, le transducteur de pression entre en très HRS avec une résistance d'environ 1 GΩ en raison de la déformation et des fissures, qui sont très courantes avec les transducteurs à base de PDMS. En raison de déformations et de fissures, les performances du transducteur de pression peuvent se détériorer après des cycles répétés, mais cela n'empêche pas la démonstration du concept même de transducteur artificiel. Lorsque la pression est relâchée, les espaces fissurés se referment, créant un LRS, faisant revenir le capteur à son état d'origine.
Un schéma similaire est observé dans les capteurs biologiques, qui se déforment également, ce qui conduit à un déplacement des ions chimiques lorsque la pression est appliquée.
Il est à noter que le composant de décision constitué par l'élément memristor STO doit être initialement électroformé en appliquant une tension de polarisation à un courant très faible de 1 µA sur les électrodes supérieure et inférieure. Cette étape crée un canal localisé pour la formation de filaments conducteurs à travers le STO. Un balayage de tension est alors nécessaire pour faire basculer l'appareil entre les états HRS et LRS.
Il est également important que, sans la pression appliquée, le courant traversant le memristor soit insuffisant pour le commuter. Cependant, lors de l'application de la pression, le capteur contenant la branche entre dans l'état HRS, ce qui conduit au potentiel maximum du récepteur sur le memristor ( 1s). Lorsque le seuil de potentiel du récepteur est atteint, le memristor décisionnel passe de l'état HRS à l'état LRS ( 2s ). Dans cet état, la séquence appliquée 0 → +0.85 V → 0 → 1.12 V → 0 fait passer l'appareil à l'état LRS pour le cycle positif et à l'état HRS pour le demi-cycle négatif ( 2d et 2e ).
Pour convertir un appareil en LRS, seul le demi-cycle positif est pris en compte. Selon l'image 2d , lorsqu'aucune pression n'est appliquée, le circuit du capteur de pression a une résistance totale de 100,6 kΩ, tandis que le composant de décision parallèle (memristor) a une résistance de 70 kΩ. Ainsi, la résistance équivalente de l'ensemble du corps de Pacini est de 41,2 kΩ.
Cette résistance équivalente fait passer un courant de seulement 0,02 mA à travers tout le circuit, ce qui peut être considéré comme un état détendu. L'application de la pression convertit le circuit du capteur de pression en une résistance extrêmement élevée de 1 GΩ, tandis que la résistance du memristor n'est que d'environ 2,5 kΩ, modifiant la résistance équivalente de l'ensemble du corps Pacini d'environ 2,5 kΩ. Cette condition de faible impédance permet un courant ≥ 0,35 mA dans tout le circuit.
Ainsi, le stimulus de pression génère un signal de réponse presque 18 fois plus élevé que dans un état détendu, ce qui peut permettre au système nerveux central d'initier sa réponse motrice. Une fois la réponse motrice terminée, l'inversion de polarité peut être appliquée au memristor en utilisant des électrodes inutilisées pour initialiser le corpuscule de Pacini.
Thermorécepteur artificiel
Pour créer un thermorécepteur à la base du memristor, la même structure d'empilement a été utilisée que pour le petit corps Pacini, i.e. métal-isolant-métal (MIM).
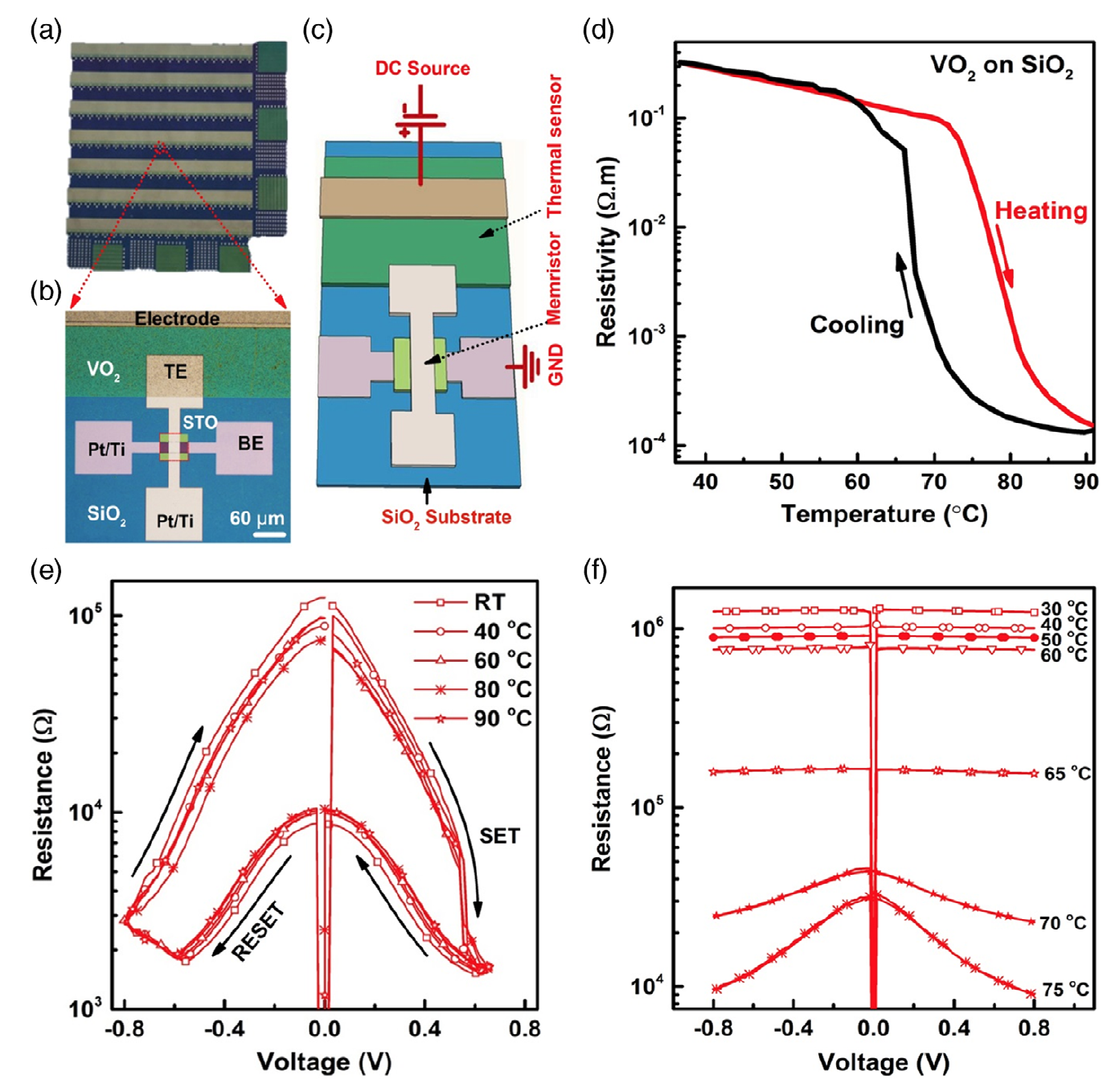
Image en №3
partie supérieure utilisée électrons en liaison avec la surface de VO 2 ( 3 a et 3b ) pour connecter séquentiellement un capteur thermique. Pour déplacer l'ensemble du dispositif, cette couche d'électrode Pt (100 nm) / Ti (10 nm) a été déposée sur la surface VO 2 . Une distance substantielle de 100 µm a été maintenue entre l'électrode initiale et l'électrode memristor supérieure.
Dans l'image 3cmontre un schéma de connexion de thermorécepteur, dans lequel la polarisation est appliquée à travers le métal au capteur thermique, et la masse (GND dans le schéma) est connectée à l'électrode inférieure du memristor prenant la décision.
Le graphique 3d montre la courbe de résistance en fonction de la température pour la transition diélectrique-métal sur un film mince de VO 2 . Evidemment, lorsque la température de transition est atteinte, la résistivité chute de quatre ordres de grandeur. Une hystérésis thermique évidente est également observée dans les cycles de chauffage et de refroidissement. On a également trouvé qu'il n'y avait pas d'effet notable de la température sur la commutation résistive ( 3e ).
Le memristor peut indiquer le changement de résistance de 100 kΩ à 2 kΩ pendant le processus de commutation. Cependant, pour une analyse plus claire, il a été décidé de considérer la résistance de l'état HRS comme 93 kΩ et la résistance de l'état LRS comme 9 kΩ à une tension de lecture de 80 mV (V READ ), car à cette tension le rapport de commutation maximal R OFF / R ON est observé . La séquence de commutation de tension de l'appareil hors ligne fini était: 0 → +0,65 V → 0 → 0,80 V → 0. Lorsque la même séquence est appliquée à l'ensemble du thermorécepteur, la résistance diminue et donc le courant du récepteur augmente avec l'augmentation de la température ( 3f ).
Pour fournir la tension de commutation requise, la température du récepteur a été maintenue à 70 ° C. Ceci permet de garantir que VO 2 est dans l'état LRS. Ensuite, l'application d'une tension de polarisation de 0 à 2 V définit et réinitialise complètement le dispositif ( 4a ).
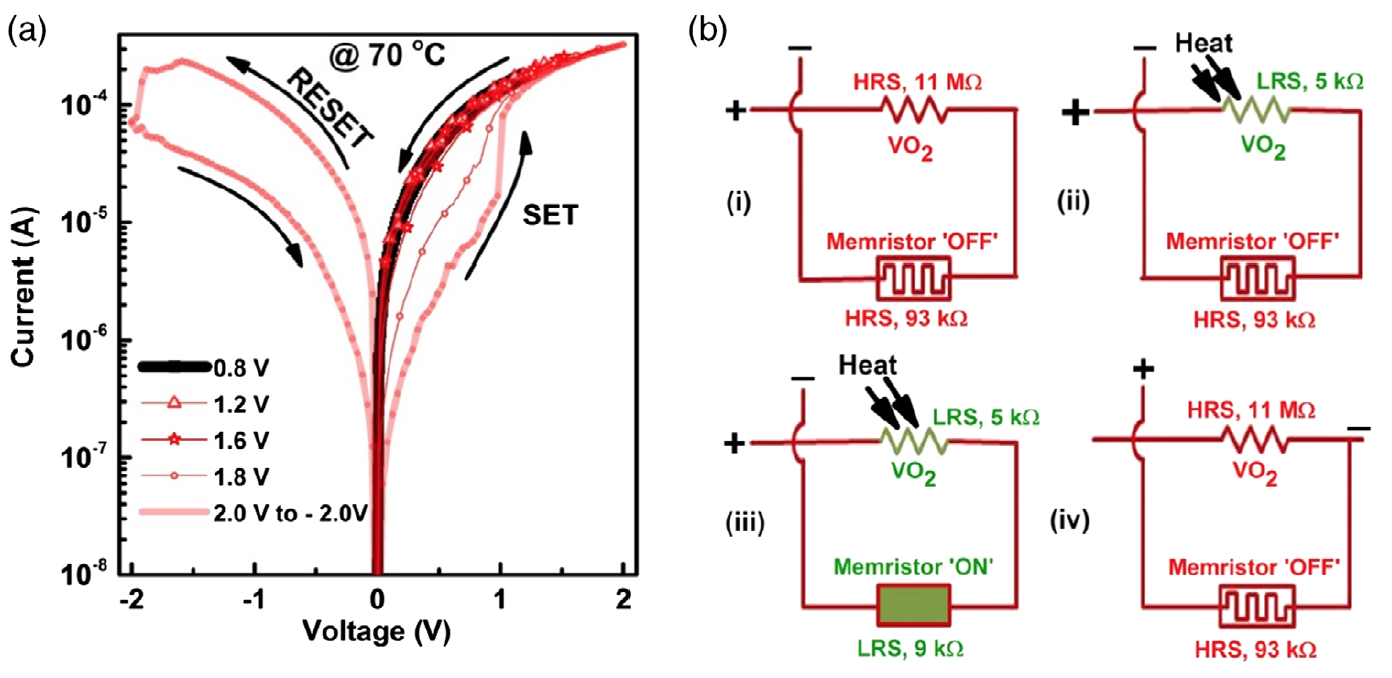
Image # 4
Pour un memristor prenant une décision, la résistance initiale de 93 kΩ est bien inférieure au HRS du capteur thermique, qui est de 11 MΩ. Ainsi, la tension partielle qui apparaît au mémristor de décision ne peut pas atteindre le seuil VSET pour la convertir de HRS en LRS. Par conséquent, le capteur thermique et le memristor sont tous deux à l'état HRS, ce qui permet à un courant minimum de circuler à travers le thermorécepteur [ 4b (i) ].
Lorsqu'une température critique de 70 ° C est appliquée, la résistance du capteur thermique diminue de quatre ordres de grandeur et la tension partielle du memristor augmente progressivement jusqu'à la tension SET avec une réponse du récepteur croissante [ 4b (ii) ]. Dès que le VSET allume le memristor, il entre dans le LRS depuis le HRS avec une résistance de 9 kΩ [ 4b (iii) ].
À ce stade, la réponse maximale du récepteur est formée. La mémoire LRS persistera longtemps même si le stimulus thermique est complètement désactivé. Pour reprogrammer le memristor, la tension négative VRESET peut le transférer du LRS au HRS [ 4b (iv) ]. Pour cela, une tension négative peut être appliquée à partir d'électrodes non utilisées ( 3c ).
Nocicepteur artificiel
Il est prudent de dire que les nocicepteurs sont très différents de leurs homologues. Les nocicepteurs se trouvent dans tout le corps humain et sont situés à l'extrémité de l'axone des neurones sensoriels.
Pour éviter l'exposition à des stimuli nocifs, le nocicepteur répond de deux manières: normale et anormale.
Dans des conditions normales, lorsqu'un nerf se terminant dans la peau reçoit un stimulus nocif, un signal de réponse est envoyé au nocicepteur pour comparer si le signal dépasse une certaine valeur seuil et pour décider si un potentiel d'action doit être généré pour le système nerveux central. Dans cet état normal, le nocicepteur est lentement désactivé pendant un temps connu sous le nom de processus de relaxation. En utilisant ce seuil et ce processus de relaxation, le nocicepteur isole le corps de tout stimulus critique et continu indésirable.
Une réponse anormale se produit lorsque le corps est confronté à des stimuli proches du seuil d'endommagement du nocicepteur, et dans cet état, le nocicepteur agit comme un récepteur normal pour éviter d'autres dommages. Si la blessure était encore reçue, la vulnérabilité du tissu affecté augmente. Le système nociceptif s'adapte à cette vulnérabilité accrue en abaissant localement le seuil nociceptif et en facilitant la réponse nociceptive, assurant ainsi une protection tissulaire adéquate.
Le nocicepteur présente deux comportements distincts dans des conditions anormales: l'allodynie et l'hyperalgésie.
L'allodynie répond à un seuil inférieur, tandis que l'hyperalgésie produit une réponse plus forte lorsque le seuil est dépassé, indiquant qu'il n'y a pas de seuil nocicepteur dans la condition anormale.
Pour observer le comportement du thermorécepteur artificiel dans des conditions normales, qui agit comme un nocicepteur pendant les stimuli nocifs, l'appareil a été commuté sur LRS et la lecture a été lue à V READ 80 mV.
La réponse du nocicepteur biologique étant fortement dépendante de l'intensité du stimulus, le nocicepteur artificiel a été exposé à une série de stimuli de température avec des intensités variables allant de 66 à 82 ° C ( 5a ).

Image # 5 Le
graphique 5b montre le signal de réponse par rapport à l'intensité du stimulus thermique appliqué. Il est à noter que le nocicepteur ne s'allume que lorsque l'impulsion de température atteint 68 ° C, qui est la température de transition du VO utilisé2 . Ainsi, lorsque le VO 2 manque le LRS en raison d'une transition induite par la température, un courant élevé commence à circuler dans le circuit. Une telle commande ressemble à des systèmes biologiques dans lesquels le nocicepteur génère un potentiel d'action qui déclenche le cerveau lorsque la force du stimulus atteint des valeurs supérieures à la valeur critique.
Une augmentation supplémentaire de l'intensité du stimulus au-dessus de la valeur seuil conduit à un courant plus important, ce qui est également cohérent avec la réponse de l'analogue biologique: plus l'intensité du stimulus est élevée, plus l'intensité de la réponse est élevée. Le graphique 5c montre les stimuli de chauffage et de refroidissement et la réponse correspondante à 68 ° C.
Graphique 5dmontre l'atténuation du signal de réponse au fil du temps après la désactivation du stimulus nuisible, c.-à-d. un processus de relaxation qui est déterminé par VO 2 , car il n'y a pas d'effet de température sur le memristor basé sur STO.
En raison de la tendance de la résistance VO 2 à augmenter avec la diminution de la température au fil du temps, le nocicepteur artificiel limite le courant à travers le circuit, et par conséquent une diminution de l'intensité des signaux de réponse est observée.
Une réponse plus forte due à des stimuli plus élevés nécessite un temps relativement plus long pour une relaxation complète. Par exemple, la réponse à 68 ° C met 100 s pour atteindre un courant de base de 0,5 μA, alors que la réponse à 80 ° C ne peut pas se détendre complètement en 100 s.
Pour observer le comportement de l'appareil dans des conditions anormales, un stimulus a été appliqué au nocicepteur artificiel, dont l'intensité était beaucoup plus élevée que dans des conditions normales.
Le nocicepteur a été chauffé à 90 ° C à une vitesse de 20 degrés par minute et refroidi à 60 ° C, qui est inférieure à la valeur seuil (68 ° C) dans des conditions normales.
Ceci a été suivi d'un réchauffage de 60 à 90 ° C, nécessaire pour déterminer la présence / absence de génération d'un seuil abaissé et une réponse améliorée, qui sont les principales propriétés de l'allodynie et de l'hyperalgésie.
La séquence 60 → 90 → 60 → 90 a été appliquée à la partie VO 2 du récepteur et à l'ensemble du récepteur contenant VO 2 et un empilement métal-isolant-métal ( 6a ).
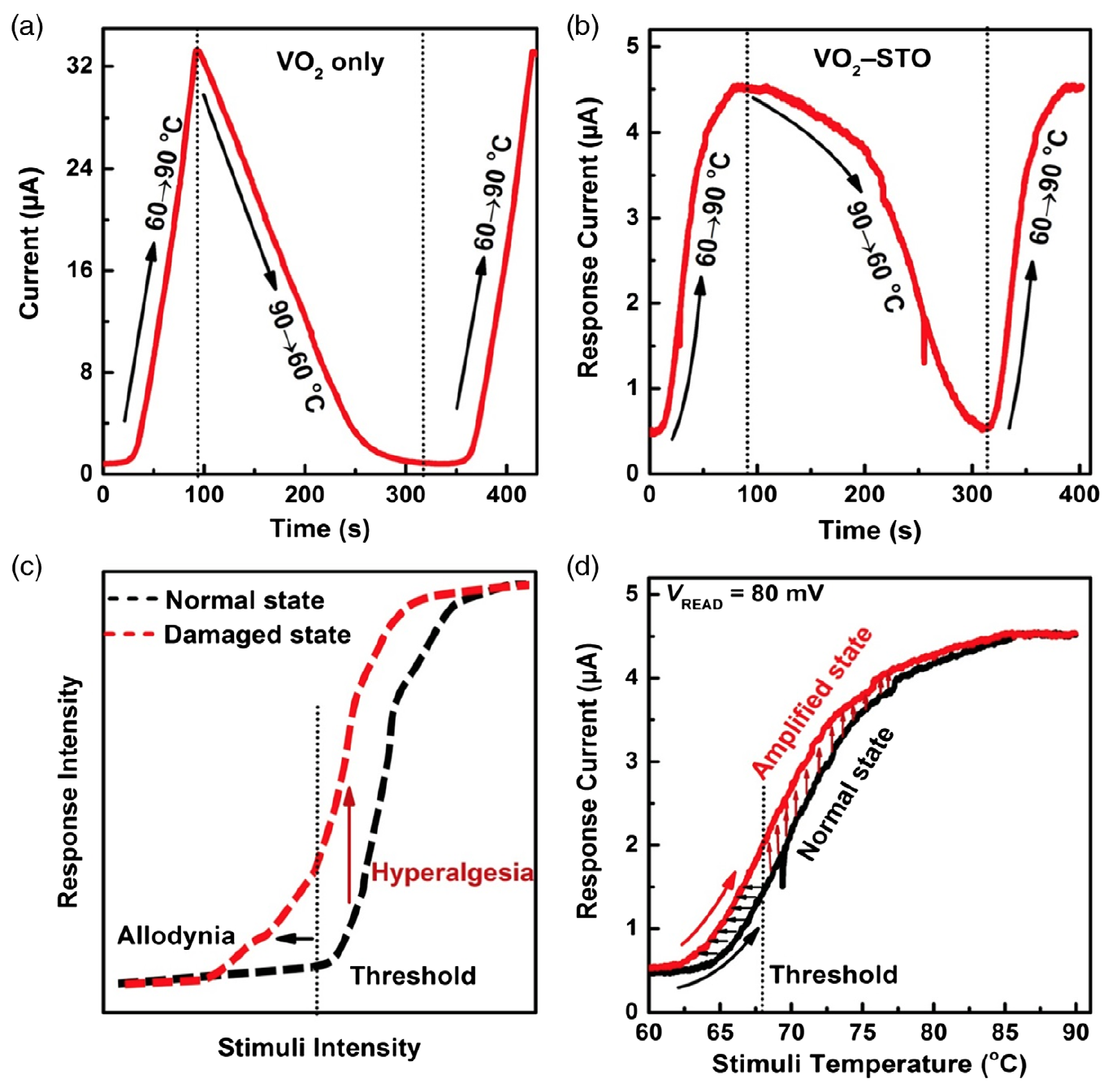
Image n ° 6
Les graphiques montrent clairement que le signal de réponse est beaucoup plus linéaire en VO 2 ( 6a ) par rapport au signal de l'ensemble du nocicepteur ( 6b ). Ceci est à prévoir, car à une intensité de stimulus élevée, VO 2 est dans un état presque métallique avec une résistance relativement faible de 5 kOhm après la transition. De plus, la tension de polarisation appliquée VREAD (80 mV) ajuste électriquement le VO 2 pour le rendre encore plus métallique, ce qui donne une réponse linéaire.
Dans le même temps, lorsqu'une polarisation V READ similaire apparaît à travers tout le nociceptor, la chute de tension maximale se produit à travers le memristor, qui est dans l'état LRS (9 kΩ). À ce stade, la tension aux bornes de VO2 ne suffit pas pour montrer une réponse linéaire. Par conséquent, ce comportement est non linéaire.
La figure 6c montre le comportement dans l'allodynie et l'hyperalgésie. Dans un système biologique, l'intensité de la réponse est plus élevée dans un état anormal pour l'intensité du stimulus sous-seuil (allodynie) et supraseuil (hyperalgésie).
Sur 6d montre une réponse par rapport à deux cycles de séquences de chauffage avec la séquence de 60 → 90 → 60 → 90 ° C. Ici, vous pouvez voir que la réponse pour le deuxième cycle de chauffage est augmentée et le seuil est réduit.
Le comportement du récepteur artificiel montre clairement une allodynie en dessous de l'intensité seuil et une hyperalgésie au-dessus de l'intensité seuil (70 ° C). Il en découle qu'en abaissant le seuil et en augmentant l'intensité de la réponse, le nocicepteur active et renforce les réactions de défense, telles que le retrait ou l'évitement de stimuli douloureux aigus.
Démonstration du principe de fonctionnement de l'équivalent électronique du petit corps de Pacini.
Pour une connaissance plus détaillée des nuances de l'étude, je vous recommande de consulter le rapport des scientifiques et des éléments supplémentaires .
Épilogue
Le cerveau humain est l'un des systèmes biologiques les plus complexes. Mais on ne peut nier le fait que la peau humaine n'est pas moins complexe, surtout compte tenu de la liste considérable de fonctions qu'elle remplit.
Il n'est pas difficile de recréer certaines des fonctions de la peau dans un équivalent artificiel, mais en ce qui concerne les récepteurs qui collectent des informations sur l'environnement, cela ne fonctionnera pas pour ainsi dire.
Cependant, les scientifiques ont encore réussi à obtenir certains résultats dans la création de récepteurs artificiels qui captent la pression, la température et la douleur.
Selon les auteurs de ce travail, leur appareil est capable de faire la distinction entre un toucher léger et, par exemple, une piqûre d'aiguille. À première vue, ce sont des choses très courantes, mais auparavant, une telle précision n'était pas dans les récepteurs électroniques.
À l'avenir, les scientifiques ont naturellement l'intention de poursuivre leurs travaux afin d'élargir la gamme des stimuli externes perçus, ce qui rendra leur appareil encore plus précis. De tels développements trouveront certainement leur application non seulement dans la prothèse, mais même dans la robotique.
Merci pour votre attention, restez curieux et passez un excellent week-end, les gars! :)
Un peu de publicité
Merci de rester avec nous. Aimez-vous nos articles? Vous voulez voir du contenu plus intéressant? Soutenez-nous en passant une commande ou en recommandant à des amis, Cloud VPS pour les développeurs à partir de 4,99 $ , un analogue unique des serveurs d'entrée de gamme que nous avons inventé pour vous: The Whole Truth About VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps à partir de 19 $ ou comment diviser correctement le serveur? (options disponibles avec RAID1 et RAID10, jusqu'à 24 cœurs et jusqu'à 40 Go de DDR4).
Le Dell R730xd 2x est-il moins cher dans le centre de données Equinix Tier IV à Amsterdam? Seulement, nous avons 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2,6 GHz 14C 64 Go DDR4 4x960 Go SSD 1 Gbps 100 TV à partir de 199 $ aux Pays-Bas!Dell R420 - 2 x E5-2430 2,2 GHz 6C 128 Go DDR3 2 x 960 Go SSD 1 Gbps 100 To - À partir de 99 $! Lisez à propos de Comment construire l'infrastructure de bldg. classe avec l'utilisation de serveurs Dell R730xd E5-2650 v4 au coût de 9000 euros pour un centime?