Après avoir regardé des vidéos sur Youtube et sur mes enfants en train de baver, j'ai décidé de m'essayer à l'auto-assemblage de cet appareil sur des scooters gyroscopiques loués. Arguant de l'opportunité de le fabriquer soi-même ou de l'acheter, je me suis convaincu qu'il s'agit d'un jouet, et saisonnier, et pour mes enfants, le temps ne peut pas se faire avec un seul appareil. En outre, l'expérience d'assemblage d'une machine CNC à domicile a joué un rôle dans la confiance en soi, et la popularité de la tendance hoverboard elle-même et l'effet wow sur les gens autour de moi ont joué un rôle.
Expérience dans l'assemblage d'un scooter gyroscopique par vous-même
En arrivant au travail, j'ai décidé de tester d'abord le concept et de déterminer la puissance requise des unités électromécaniques afin de justifier de nouveaux investissements dans les composants.
La première version (segway)
D'un point de vue mécanique, la version segway semblait plus simple (il n'y a pas de pivot central chargé), en plus, tout ce que j'ai trouvé sur youtube est du segway fait maison.
Malgré le fait que j'ai une expérience suffisante de la programmation et du travail avec les contrôleurs, j'ai décidé de ne pas écrire le logiciel moi-même, mais de trouver les solutions les plus prêtes à l'emploi. De plus, je peux rarement maintenir ma motivation plus d'un mois, et le débogage des logiciels avec des nœuds électromécaniques se termine rarement par une victoire absolue, plus souvent par un compromis, et la pensée que la perfection n'avait pas été atteinte me verrait.
En conséquence, le choix s'est porté sur le travail du Segway Clone d'Ovaltine (les sources sont sur GitHub). Ce projet m'a semblé être le matériel le plus mature et le plus support que je possède (Arduino, MPU-6050, pilotes de moteur avec 2 et 3 signaux de contrôle par canal). Le projet est commenté en détail, ce qui vous permet de ne pas approfondir l'analyse des nuances et, par conséquent, de ne pas deviner les lacunes.
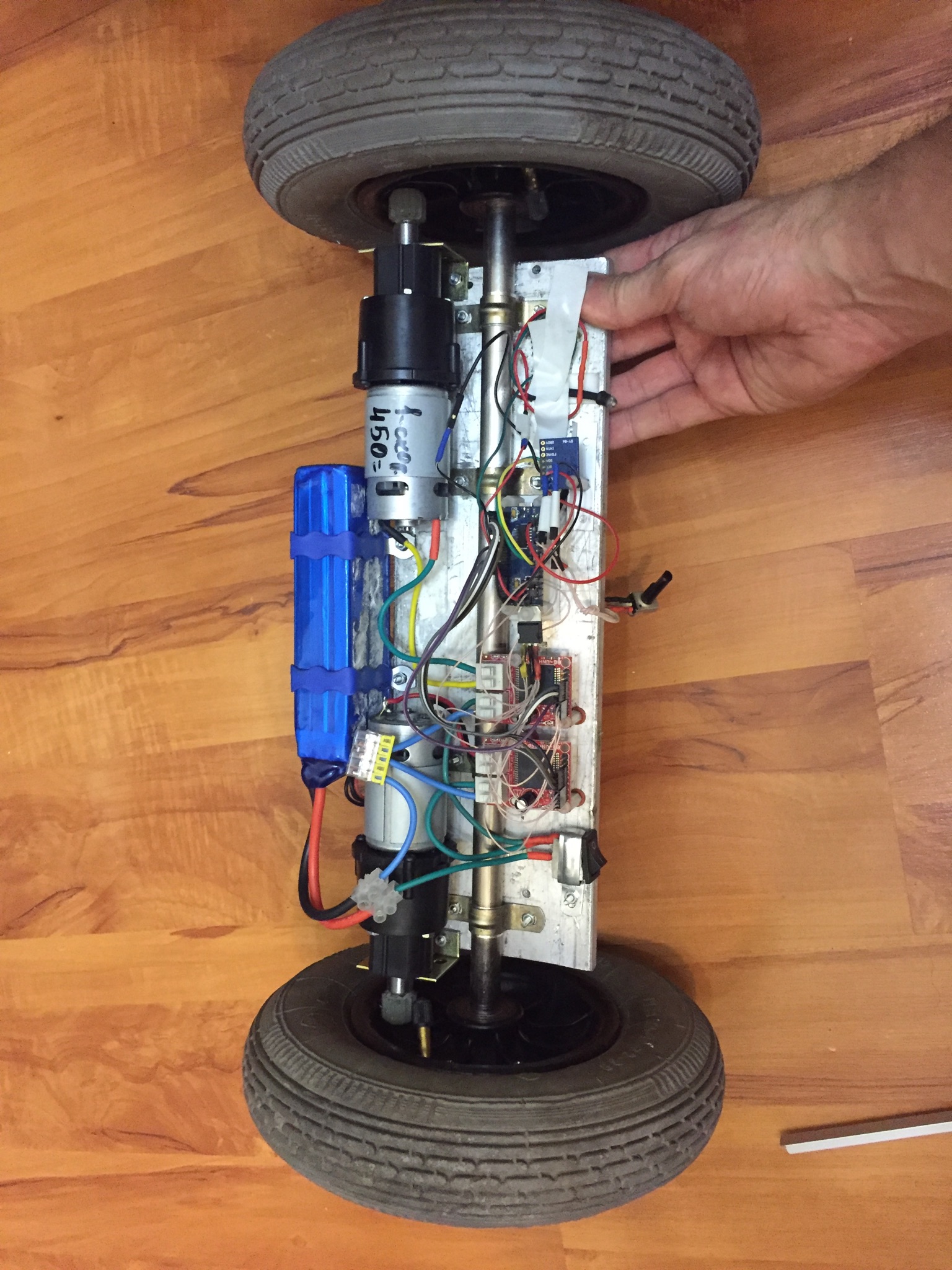
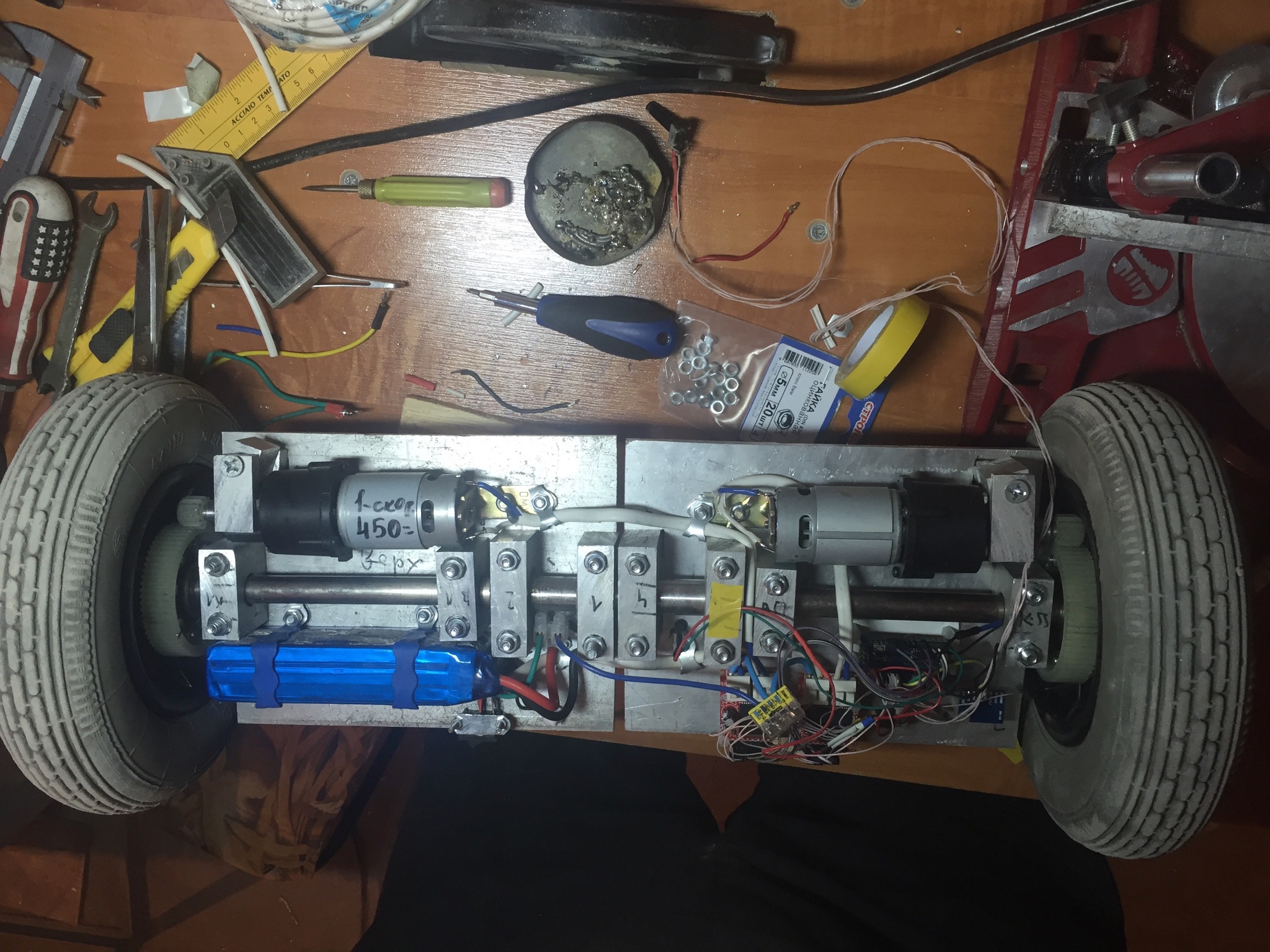
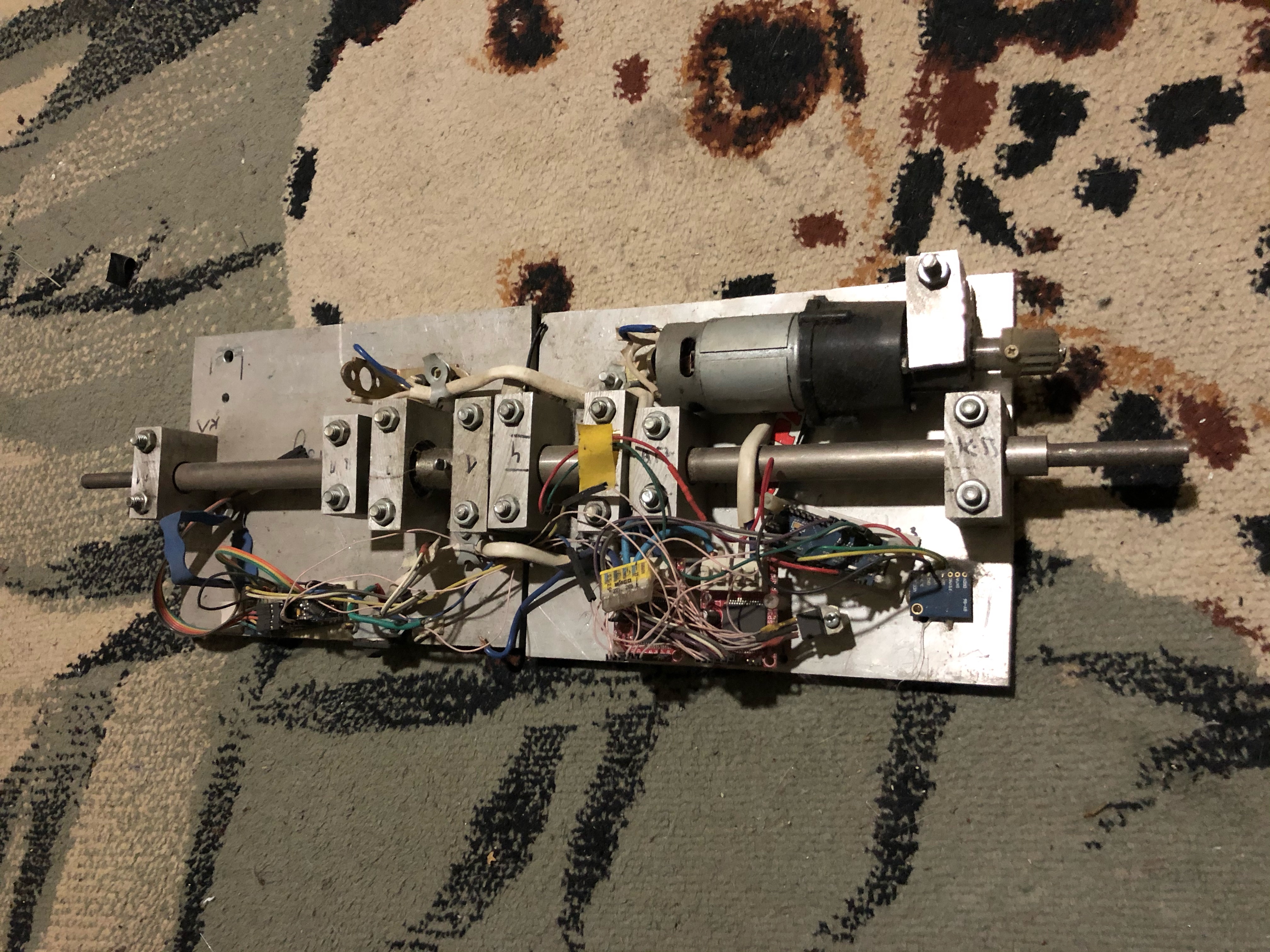
Après un court délai, la plateforme de test a été giflée:
Épaisseur de la plaque d'aluminium 12 mm
Axe d'un diamètre de 14 mm - un guide d'une imprimante matricielle
Agrafes de construction diamètre 14 mm
Roues - avant du fauteuil roulant (8 '' de diamètre, roulements intégrés).
Moteurs et réducteurs planétaires à partir de tournevis 18V
Engrenages de transmission sur roues de hachoirs à viande électriques
Batterie 12V 5Ah Li-pol (à gauche après le ralentissement de la tendance de construction quadcopter)
Pilote Vhn3sp30
Arduino Nano
10DOF MPU-6050 ( )
,
, .1,3,4,5,6,11 .
, , , (450 , 500 ). ? , .
( 30). vnh2SP30 eBay 600, , vnh3SP30 « » (, ) .
. , , , .
: 0,5 . ( ). – . , , . 20 .
, « – » . 5:1. 1:25. 12 8 ( 5-8/). .
! vnh2 14.
.
, . , , , , , , .
()
, , , « ». , . 6 ( 12) ( 80).
, (). , .
( 17 23). , . . ( , , ). , .. (.. ).
, ( ). , , , .
: , . 16 , ( ) . . (6 .) , , .
22,5. , .
. . « ». . - . .

, , . , . ,
( \; __)
+5 : =5 =5. -5 (.. ) =5-(-5)=10; =5+(-5)=0. - .
( __; )
0 () : =0 =0. +5 ( ) =0+(-5)=-5; =5-(-5)=5. – .
( )
, ( ).
, Arduino . analogRead ( ), .. .
.
, , . «» ( ) . .
, , ( 3 ), . .. , . , .

, .
(204) . , . , , 5 . .
, , .
, . , . ( 1,5-3 - ) . , ( ). - 135…125.
– . , , «» .
5 . .
...
... et une expérience inestimable pour sortir du canapé la motivation!
C'est tout. Tout bon!