
«Fondamentalement, notre travail porte sur la façon de concevoir un comportement de commutation spontanée en utilisant une dynamique chaotique», explique le co-auteur Kohei Nakajima, mathématicien appliqué à l'Université de Tokyo au Japon. En règle générale, les ingénieurs conçoivent un robot capable de marcher et de courir, et l'expérimentateur pourrait alors utiliser un contrôleur portable externe pour changer ces «comportements». Mais pour passer d'un tel environnement contrôlé à un environnement dans lequel le robot peut changer de comportement de manière autonome, les chercheurs ont cherché à simuler un mouvement chaotique. Souvent vu dans le cerveau des animaux et d'autres systèmes dynamiques, le routage chaotique se produit lorsqu'un système bascule de manière imprévisible mais déterministe entre plusieurs modèles stéréotypés, qu'il s'agisse de marcher, de courir ou de toute autre forme de comportement.

Expériences passées
La robotique a cherché à imiter le mouvement chaotique dans le passé, selon l'auteur principal Katsuma Inoue, un étudiant diplômé de l'Université de Tokyo. Un robot, créé en 2006, a modélisé un bébé humain avec un système somatosensoriel et des centaines de moteurs représentant les muscles du corps, chacun connecté à plusieurs oscillateurs chaotiques - l'équivalent brut des motoneurones. Les systèmes somatosensoriels interagissent avec des oscillateurs chaotiques, qui signalent alors aux «muscles» de bouger. Conçu pour imiter le développement précoce de la motricité humaine, le système reproduit des mouvements de type chaotique en alternant plusieurs comportements stéréotypés, notamment ramper et se retourner.
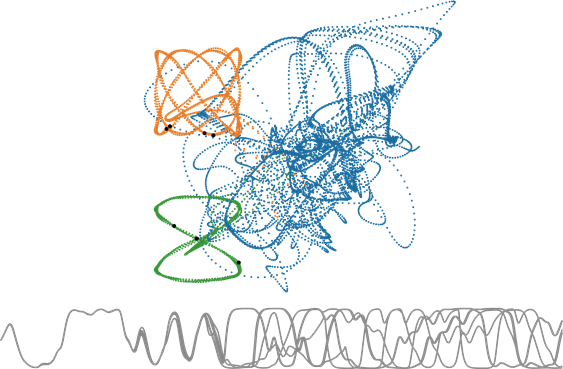
Les formes bleues, orange et vertes de cette image représentent divers comportements que les auteurs ont conçus pour que leur cerveau robotique permute de manière autonome. Pour ce faire, les chercheurs ont créé les caractéristiques d'un phénomène appelé mouvement chaotique. Image tirée de la conférence «Concevoir la commutation comportementale spontanée via l'itinérance chaotique» (Katsuma Inoue, Kohei Nakajima et Yasuo Kuniyoshi).
D'autres recherches se sont concentrées sur le développement d'un comportement de commutation spontanée chez les robots en utilisant une structure hiérarchique avec un réseau neuronal de niveau supérieur pilotant des modules de niveau inférieur correspondant à chaque type de comportement. Cependant, selon Kohei Nakajima, le processus d'apprentissage prend beaucoup de temps dans ces expériences.
En quoi le système est-il unique?
Pour surmonter ces problèmes, les chercheurs japonais n'ont pas utilisé de conception hiérarchique. Au lieu de cela, dans une méthode en trois étapes utilisant un cadre d'apprentissage automatique, les chercheurs ont d'abord identifié plusieurs comportements possibles et formé le réseau de neurones à les reproduire selon des commandes. Les chercheurs ont ensuite formé le réseau à basculer entre ces comportements dans un ordre spécifique, et ont finalement développé des transitions probabilistes entre ces comportements en utilisant une dynamique chaotique. Le résultat était un système avec des caractéristiques de mouvement chaotique.

(A) , . : - (ESN) ESN. ESN ESN, , ESN . ESN - , ESN ESN , 0. (B) . . , . , , CI. , . 1 , . 2 3 . 2 3.
Que va-t-il se passer ensuite?
L'idée clé de la recherche est de créer une manière plus simple et plus élégante de réaliser une locomotion spontanée, similaire à celle des animaux. Cependant, la mise en œuvre de cette étude s'est jusqu'à présent limitée à un réseau neuronal sur un ordinateur. Les chercheurs envisagent désormais de passer des ordinateurs aux robots physiques dans l'espoir de créer enfin des machines qui se comportent de manière autonome et spontanée.
Caractéristique distinctive du cerveau humain, la plasticité de l'esprit permet aux gens d'acquérir de nouvelles connaissances sans détruire de vieux souvenirs. Les scientifiques voient cette recherche comme une étape vers la création d'un cerveau synthétique qui peut avoir une mémoire qui peut interagir avec l'environnement à travers un corps artificiel.
Liste de références:
- Adam Smith. AI with “spontaneous” behaviour like animals developed [ ]. URL: www.independent.co.uk/life-style/gadgets-and-tech/scientists-ai-spontaneous-behaviour-animals-b1762407.html
- Amy MacDermott. New technique builds animal brain–like spontaneity into AI [ ]. URL: blog.pnas.org/2020/11/new-technique-builds-animal-brain-like-spontaneity-into-ai
- : Katsuma Inoue, Kohei Nakajima, Yasuo Kuniyoshi. Designing spontaneous behavioral switching via chaotic itinerancy [ ]. URL: advances.sciencemag.org/content/advances/6/46/eabb3989.full.pdf