
L'accéléromètre le plus simple, comment ça marche?
Un accéléromètre est un appareil qui mesure la projection de l'accélération apparente (la différence entre l'accélération réelle d'un objet et l'accélération gravitationnelle). Son fonctionnement peut être expliqué à l'aide d'un modèle simple.
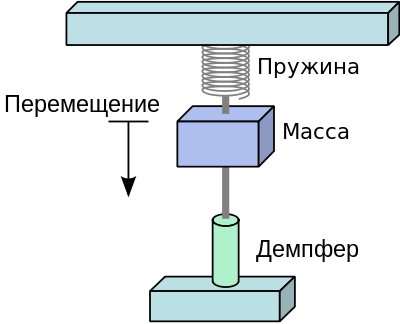
Modèle d'accéléromètre mécanique ( original )
Lorsque l'accélération augmente, la masse étire le ressort. Selon la loi de Hooke du programme de physique de l'école, vous pouvez facilement trouver l'accélération du système:
, où k est le coefficient d'élasticité du ressort, Est sa tension et m est la masse de la charge.
À l'aide de trois capteurs situés perpendiculairement, on peut connaître l'accélération d'un objet selon 3 axes, et connaissant les conditions initiales, déterminer la position du corps dans l'espace.
Ce modèle simple est à la base du fonctionnement de la plupart des accéléromètres, qui peuvent être divisés en 3 sous-groupes principaux:
- mécanique
- électronique
- piézoélectrique
Il y en a aussi des thermiques et optiques, mais nous ne les considérerons pas. Si tout est clair avec les mécaniques (en fait, leur travail est reflété par le modèle d'en haut), alors avec les électroniques et piézoélectriques, c'est un peu plus intéressant.
Accéléromètre piézoélectrique
Ce type de capteurs est basé sur l'effet piézo, qui a été découvert en 1954 par Smith dans des semi-conducteurs tels que le germanium et le silicium. Cette découverte a donné une forte impulsion au développement de capteurs et de générateurs. L'effet est la génération d'une contrainte par l'élément piézoélectrique lors de la déformation.

Animation de l'effet piézoélectrique ( original )
Avec une accélération croissante, la masse inerte augmente / diminue la pression sur l'élément piézoélectrique. Grâce à l'effet piézoélectrique, un signal est généré qui dépend de l'accélération externe.

Dispositif accéléromètre piézoélectrique ( original ) Les
capteurs de ce type nécessitent un amplificateur supplémentaire, qui augmente l'amplitude du signal et crée une sortie à faible impédance pour fonctionner avec des appareils externes. Le boulon de précharge est utilisé pour étalonner la valeur d'accélération nulle, dont la masse est calculée pour correspondre au point zéro de l'accélération dans le système.
Les capteurs de ce type sont encore très courants et sont principalement utilisés dans les systèmes nécessitant une grande fiabilité - automobile. Pour l'électronique commerciale, des accéléromètres électroniques sont souvent utilisés, qui sont plus petits et moins chers.
Accéléromètres électroniques
Le principe de fonctionnement des capteurs électroniques est basé sur un changement de capacité des condensateurs avec un changement d'accélération. Le modèle de travail le plus simple est montré dans l'image.
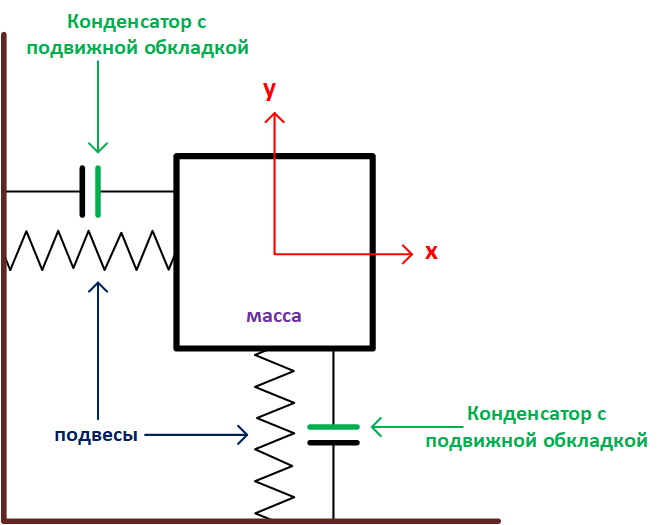
Le dispositif d'un accéléromètre électromécanique à 2 axes
Lorsque l'accélération change, la masse modifie la distance entre les plaques du condensateur. De la formule la plus simple pour la capacité d'un condensateur il s'ensuit que lorsque d change la distance entre les plaques, la capacité du condensateur changera également. Cette méthode est largement utilisée en raison du développement de MEMS (MEMS) - systèmes microélectromécaniques.
Les technologies MEMS permettent de créer des condensateurs à plaques mobiles sur un substrat de silicium, ce qui réduit considérablement la taille du dispositif et, ce qui n'est pas sans importance, son coût.

Le dispositif d'un accéléromètre électromécanique à 2 axes (original du livre "Introductory MEMS" . D'autres illustrations sont également tirées de ce livre)
Le lecteur a probablement une question: "comment détecter exactement un changement de capacité du condensateur?" Je vais essayer de donner une réponse exhaustive à cette question.
Dispositif accéléromètre MEMS. Comment transformer un changement de capacité en un signal?
Demi-pont capacitif
Donc, avant de décrire le fonctionnement du capteur lui-même, passons à un circuit assez populaire dans les circuits - le demi-pont capacitif.

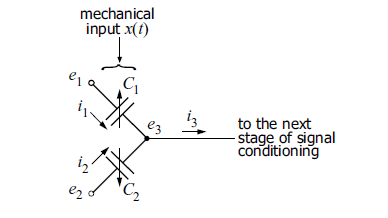
Demi-pont capacitif - la base des capteurs de
tension MEMS et sont entrées, et - signal de sortie pour conversion ultérieure. Les capacités des deux condensateurs dépendent de l'accélération externe et changent de la valeur x (t). A x = 0, les charges sur les conteneurs sont identiques, et en même temps ... A condition que x << d on trouve comment le changement de la capacité des condensateurs dépend du changement de la position de la plaque.
Dérivation de la formule pour changer la capacité
Écrivons le changement de chaque capacité lorsque la plaque est décalée de x:
Écrivons la formule de capacité:
, :
, x <<d, xd d^2 , :
Écrivons la formule de capacité:
, :
, x <<d, xd d^2 , :
Une partie du chemin a donc été parcourue, nous avons compris comment la valeur du changement de capacité dépend du changement de la position de la plaque (c'est-à-dire de l'accélération externe). Il est temps de détecter ce changement: nous introduisons des courants supplémentaires - ... Il reste maintenant à calculer comment le courant de sortie dépendra du changement de position de la plaque.
Demi-pont capacitif - courants
Dérivation de la formule pour la dépendance du courant de sortie sur le changement de capacité
:
, dq/dt, q=CU, :
, (1.1):
, dq/dt, q=CU, :
, (1.1):
Donc, si vous utilisez les mêmes potentiels des tensions d'entrée on obtient la dépendance du courant:
Le résultat est assez étrange: le courant de sortie ne dépend en aucun cas du changement de capacité. Afin de détecter un changement de capacité, il est nécessaire de régler des tensions de polarité différente sur les plaques, c'est-à-dire: , une ... Ensuite, nous refaireons l'équation en tenant compte de cette modification.
Dépendance du courant au changement de position de la plaque, en tenant compte de la polarité différente des tensions d'entrée
1.3:
:
:
1.2 , :
:
:
1.2 , :
À partir de cette équation, les faits suivants sont visibles:
- si la position des plaques ne change pas dans le temps, alors
- de même si la source du signal constante (DC), alors
Pour le fonctionnement efficace du demi-pont capacitif, il est nécessaire d'utiliser des signaux d'entrée variables e1 et e2, dont le déphasage entre lesquels sera de 180 degrés (pour que les potentiels aient des signes différents). Par conséquent, nous obtenons la forme de signaux suivante:
où - la fréquence du signal alternatif (déterminée lors de la conception, en fonction de la bande passante du système et du fonctionnement normal des conteneurs mécaniques).
Nous avons donc obtenu l'équation (1.4), qui montre comment un changement de capacité du condensateur affecte la sortie du système. Cependant, un tel signal aura une amplitude assez petite, de plus, si nous y connectons une charge pour communiquer avec le monde extérieur, tout le système s'effondrera. Un amplificateur est nécessaire ici ...
Ajoutez simplement un amplificateur
Ajoutons un amplificateur à notre système (nous supposerons que le gain est - le principe de la terre virtuelle fonctionne).
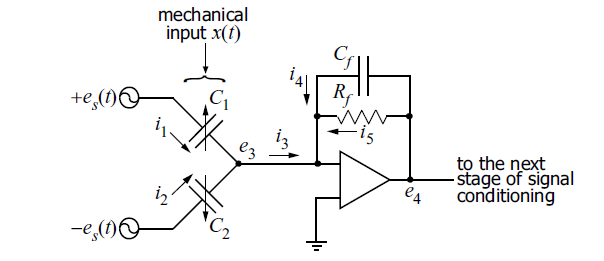
Demi-pont capacitif + intégrateur
Nous trouvons donc maintenant la dépendance de la tension de sortie de l'amplificateur sur le changement de capacité.
Tension de sortie de l'amplificateur
:
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
En conséquence, nous avons obtenu la dépendance du signal de sortie de l'amplificateur sur le changement de position de la plaque de condensateur. Le lecteur attentif doit immédiatement remarquer qu'il s'agit d'une modulation d'amplitude! En effet, dans ce système nous avons un signal x (t), qui est multiplié par le signal et amplifie par la quantité ... La prochaine étape consiste à supprimer la fréquence porteuse , et nous obtenons un signal amplifié x (t) - qui est proportionnel à l'accélération. Un long chemin de calcul nous a conduit à comprendre l'architecture de l'accéléromètre MEMS.
Architecture d'accéléromètre MEMS
Considérons d'abord le schéma fonctionnel du capteur:
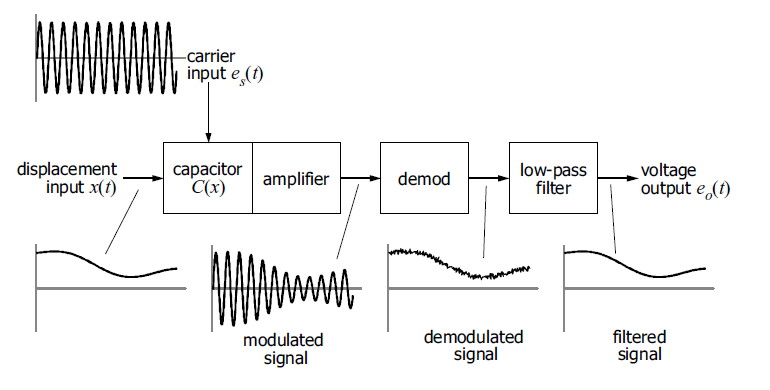
Schéma fonctionnel d'un accéléromètre MEMS
Au départ, nous avons un signal x (t) - qui reflète le changement d'accélération. Ensuite, nous le multiplions par le signal porteur et amplifié avec un amplificateur opérationnel (en mode intégrateur). Ensuite, la démodulation se produit - le circuit le plus simple - une diode et un filtre RC (en réalité, un circuit compliqué est utilisé, synchronisant le processus de modulation et de démodulation avec une fréquence porteuse ). Ensuite, le bruit résiduel est filtré à l'aide d'un filtre passe-bas.
A titre d'exemple, je citerai l'un des premiers accéléromètres MEMS d'Analog Devices - ADXL50:
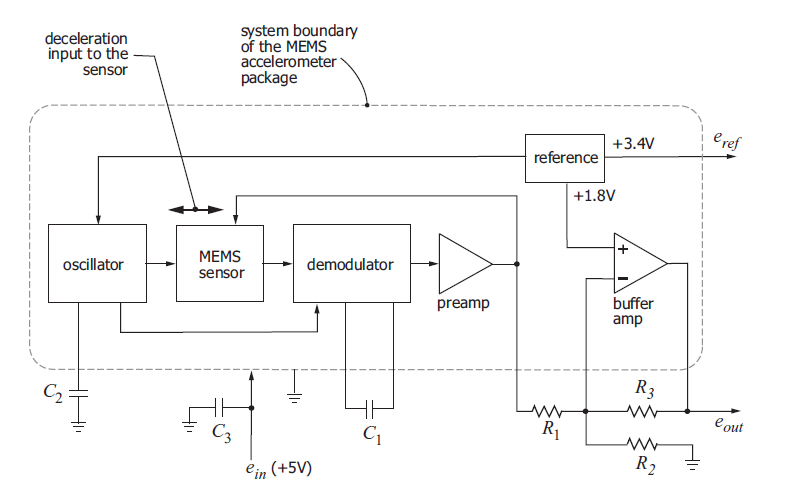
Schéma de principe de l'ADXL50
Probablement, en donnant le schéma de principe du capteur au début de l'article, de nombreux lecteurs ne comprendraient pas le but de certains blocs. Maintenant, le voile est entrouvert, et nous pouvons discuter de chacun d'eux:
- Le bloc appelé «capteur MEMS» est un demi-pont capacitif.
- Le bloc «oscillateur» génère un signal à une fréquence de 1 GHz.
- Le signal de l'oscillateur est également utilisé pour la démodulation synchrone.
- , ( VDD/2- , — «»).
- .
- , .
?
Le choix du transducteur à utiliser avec les capteurs dépend de la précision souhaitée. Pour travailler avec des capteurs, des ADC avec une architecture SAR ou Delta-Sigma avec une profondeur de bits élevée conviennent. Cependant, les capteurs modernes ont des transducteurs intégrés. Les leaders dans ce sens sont STMicroelectronics, Analog Devices et NXP. À titre d'exemple, nous pouvons donner un nouveau microcircuit avec un accéléromètre à 3 axes et ADC intégré - ADXL362.

Schéma fonctionnel de l'ADXL362
Pour travailler avec l'ADC, des filtres anti-aliasing ont été ajoutés au circuit pour empêcher les harmoniques supplémentaires d'entrer dans le spectre.
Où trouver une telle technologie?
Il existe maintenant de nombreuses usines disponibles pour les entreprises sans usine qui offrent la technologie MEMS. Cependant, pour créer des microcircuits modernes, il est nécessaire d'intégrer des capacités avec des plaques mobiles dans un itinéraire de conception standard, car en plus d'une telle capacité, il est nécessaire de concevoir des blocs supplémentaires (générateur, démodulateur, ampli opérationnel, etc.) sur une seule puce. A titre d'exemple, les usines TSMC et XFab proposent la technologie pour implémenter un capteur MEMS avec l'ensemble du faisceau. L'image montre les conteneurs qui vous permettent de créer un accéléromètre à trois axes:
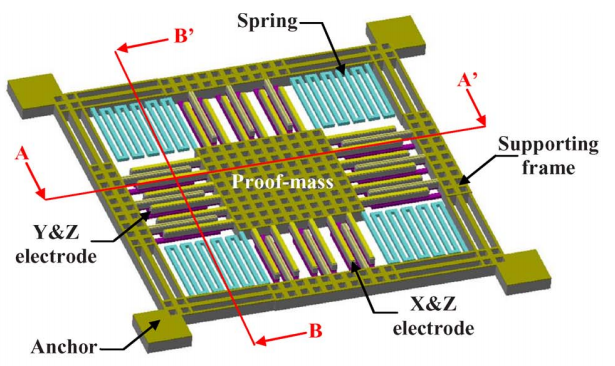
Demi-pont capacitif à trois axes de TSMC
Il existe également une usine de production de capteurs MEMS, Sovtest, en Russie , mais l'entreprise ne dispose pas de la technologie pour intégrer les blocs de circuits supplémentaires nécessaires à la création du dispositif final et la seule solution est d'utiliser la technologie de micro- assemblage .
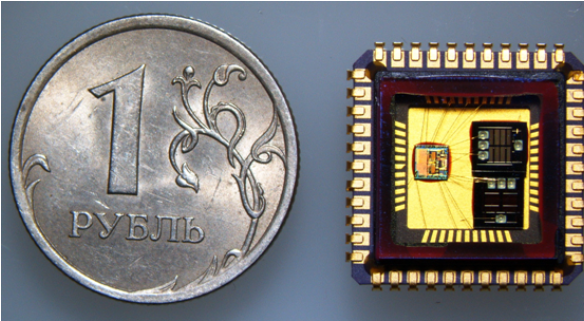
Accéléromètre MEMS développé par Sovtest
Quels développements notre entreprise a-t-elle dans ce sens?
Nous avons plusieurs transducteurs conçus pour fonctionner avec des capteurs. Les nouveaux produits incluent:
- 5101NV035 - Convertisseur 16 canaux basé sur 8 ADC Delta-Sigma, conçu pour fonctionner avec des capteurs de courant
- 1316NX035 - Convertisseur tension-fréquence (VFC) intégrant 4 canaux, conçu pour fonctionner avec des accéléromètres et gyroscopes à 3 axes.
Comme je l'ai écrit dans l' article précédent , le délai d'attente pour les plaques de l'usine peut prendre un temps assez long. Après le premier essai de l'ADC 400 MHz, l'heure d'arrivée des plaques et d'autres mesures ont pris plus de six mois. Pendant ce temps, notre équipe a réussi à fabriquer PNC 1316NX035 (développement du circuit 1316PP1U précédent ), dont je peux vous parler un peu.
Convertisseur tension-fréquence
Pour convertir les données d'un capteur, des ADC SAR ou delta-sigma sont généralement utilisés, mais il existe un autre type de convertisseurs - intégrant des VFC, qui présentent des avantages significatifs:
- Ils prennent moins de place au sol et consomment moins avec la même linéarité et le même bruit.
- Architecture simple.
- Immunité élevée au bruit d'entrée et aux signaux d'interférence.
- Immunité au bruit et aux interférences du signal de sortie.
- La possibilité de transférer des données sans traitement vers un canal de communication radiofréquence.
Le microcircuit 1316NX035 est un convertisseur tension-fréquence à quatre canaux et un code numérique; les sorties d'un accéléromètre à trois axes sont connectées aux trois principaux canaux de haute précision. Le 4ème canal dispose d'un multiplexeur d'entrée à 4 canaux, auquel vous pouvez connecter des capteurs système supplémentaires: température, humidité, etc. Au microscope, le circuit ressemble à ceci:
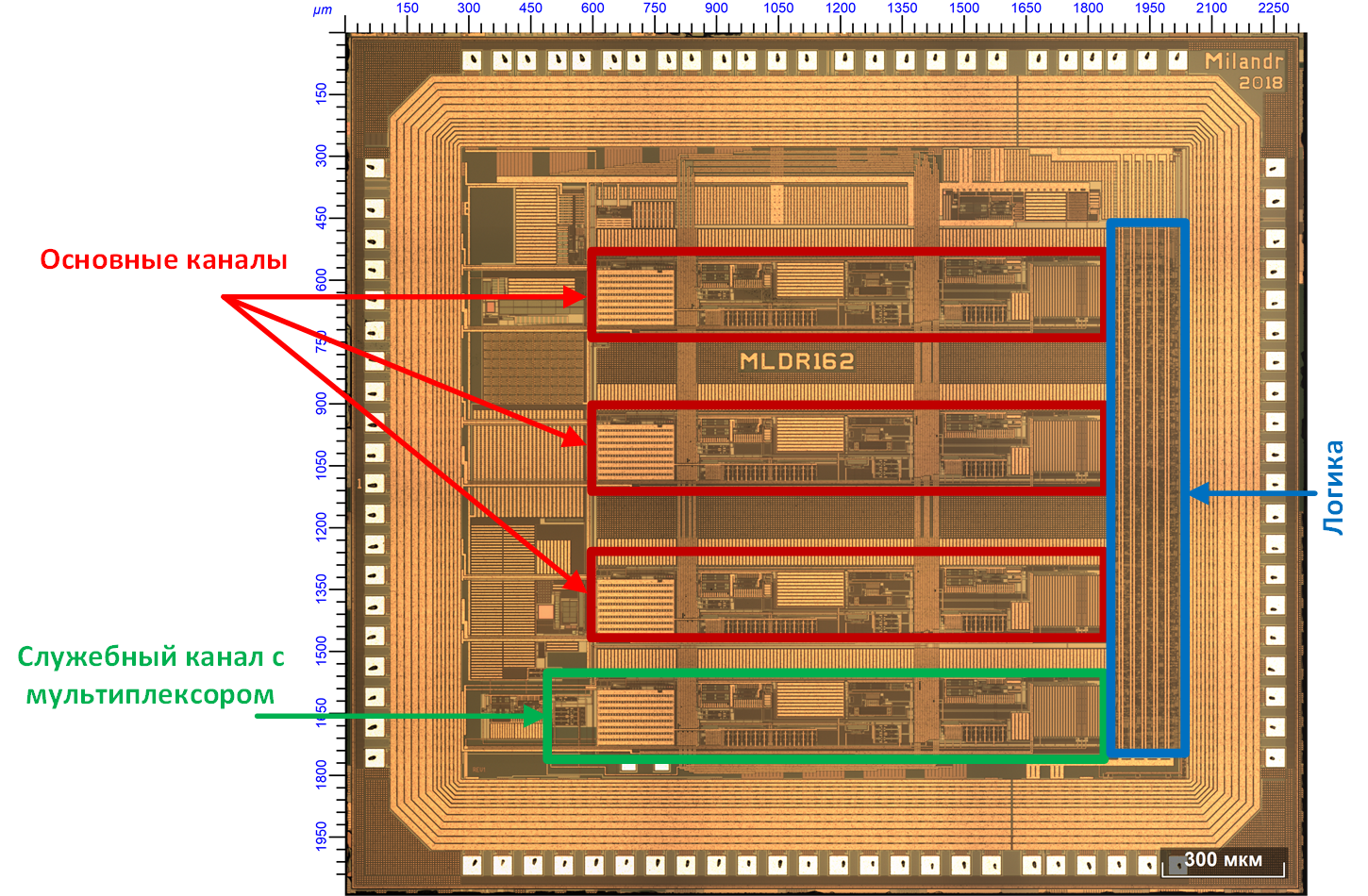
VFC sous un microscope
Chacun des trois canaux principaux convertit une tension d'entrée dans la plage de ± 4V en une fréquence allant jusqu'à 1250 kHz à 3 sorties correspondant à des tensions d'entrée positives et négatives. De plus, le microcircuit a un compteur inverse de 16 bits dans chaque canal pour compter les impulsions de fréquence. L'interface SPI est utilisée pour contrôler les modes de conversion et échantillonner le contenu des compteurs d'impulsions de canal. Les principales exigences relatives aux paramètres PNC étaient:
- stabilité thermique et temporelle élevée de la fréquence de sortie pour un signal d'entrée nul (entrées mises à la terre)
- plage dynamique de conversion - pas moins de 22 bits
- continuité de conversion du signal d'entrée et inadmissibilité de la perte d'une seule impulsion de fréquence.
Pour répondre aux exigences 1 et 2, un auto- étalonnage analogique est utilisé , qui est effectué automatiquement à la mise sous tension du circuit, et peut également être démarré à tout moment par commande via l'interface SPI. L'exigence 3 est fournie et garantie par des solutions de circuits. Nous avons réussi à obtenir des paramètres de précision assez décents: la non-linéarité de conversion typique était de 30 ppm et le décalage du zéro était inférieur à 0,1 Hz avec un facteur de conversion de 200 kHz / V. Plage dynamique de conversion: fmax / fmin = 2 * 1,25 MHz / 0,3 Hz ∿ 8,33 M, ce qui correspond à plus de 23 bits.
Il n'y a qu'un seul «mais» - la nutrition bipolaire. Pour assurer une bonne stabilité du zéro (tension qui correspond à une accélération de 0g), une alimentation bipolaire doit être utilisée. Cette solution est assez efficace - après tout, lorsque 0g correspond à «masse», le système sera a priori stable. Il améliore également la conception du système. Dans les capteurs modernes, la moitié de l'alimentation Vdd / 2 est utilisée comme zéro, mais si la tension au convertisseur diffère de la tension au capteur, nous obtenons automatiquement un décalage qui doit être étalonné en plus.
Probablement, pour de nombreux consommateurs, la tension bipolaire fait un peu peur, et nous, en tant que développeurs, le comprenons. Peut-être, à l'avenir, nous ferons une version commerciale pour MEMS (ou intégrerons le capteur dans le PNC). Jusqu'à présent, bien sûr, ce ne sont que des plans, mais je suis sûr qu'ils verront le jour.
PS J'ai trouvé des photos bonus issues du processus de recherche d'échantillons. En général, c'est pour moi la partie la plus intéressante du processus de développement. Ils vous donnent entre vos mains votre idée dans la chaleur de l'usine, vous lui fournissez de l'énergie et vous croisez les doigts vous attendez - "ça marche ou pas?"

PPS Quiconque a aimé le sujet des capteurs, à l'avenir, un collègue du centre de conception de matériel aimerait parler du système inertiel en cours de création à partir de capteurs MEMS - SINS .