Il y a un peu plus d'un an, j'ai eu la chance de faire partie de l'équipe de scientifiques et d'ingénieurs responsables de l'exploitation du rover Curiosity. Depuis, j'ai beaucoup appris sur les rovers. Mais il reste encore plus à voir. Spirit, Opportunity, Curiosity et Perseverance font partie des robots les plus sophistiqués et les plus fiables jamais créés par l'homme. Dans le même temps, les outils et méthodes utilisés pour contrôler les rovers sont assez faciles à apprendre et compréhensibles. Et c'est bien, car le 18 février, Perservance descendra à la surface de Mars, après quoi elle sera envoyée pour étudier la planète. Maintenant, ma tâche est de vous dire comment contrôler le rover. Lorsque le nouveau rover arrivera sur Mars, vous comprendrez déjà ce qui se passe et comment tout cela fonctionne.
Une grande partie de cet article est un résumé de mes expériences avec Curiosity. Gardez à l'esprit que l'esprit et l'opportunité sont à bien des égards similaires à leur «héritier» à cet égard. Les mêmes technologies et méthodes seront utilisées pour gérer Perservance, il n'y aura donc pas de différences significatives.
Les bases
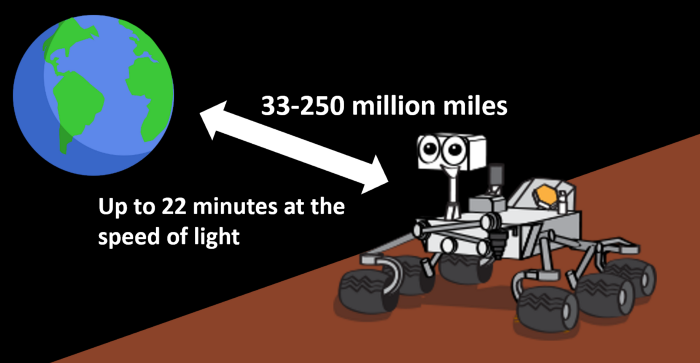
La principale chose à savoir est que Mars est très, très loin de nous. Un signal radio envoyé depuis la Terre atteint la surface de Mars en 22 minutes. Par conséquent, le contrôle en temps réel n'est pas une option. De plus, Curiosity reçoit des informations de la Terre une fois par jour. Le reste du temps, il est seul. Dans le même temps, nous ne parlons d'aucune autonomie: le rover a un ensemble limité d'actions qu'il peut effectuer de manière autonome. La plupart de ce que fait le rover est planifié et écrit dans la mémoire de l'appareil sur Terre.
Bien sûr, il y a quelques exceptions: le rover doit être capable de résoudre seul certains problèmes. Mais la plupart de ces décisions «s'arrêtent et attendent des instructions de la Terre en réponse à un facteur externe. Aegis a un certain degré d'autonomie - un système qui peut choisir indépendamment un morceau de roche dans lequel Curiosity doit "tirer" avec un laser.
attention a la marche
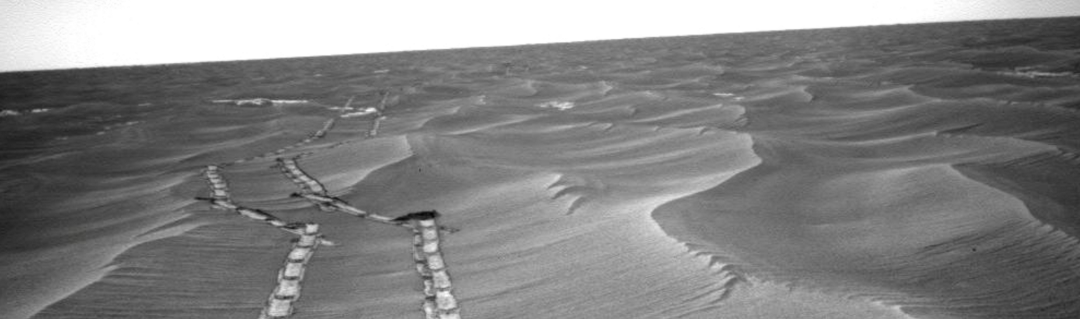
La tâche principale de l'opérateur du rover est d'assurer sa sécurité tout au long de son voyage sur Mars. Par conséquent, vous devez soigneusement évaluer toutes les options possibles pour vos actions. Les rovers de la NASA ont plusieurs caméras, grâce auxquelles le rover forme une "image" comme s'il était vu avec des yeux humains. Il existe également des hazcams, des «caméras de danger» qui évaluent la présence de problèmes dans les environs, ainsi que des navcams - des caméras de navigation qui évaluent la route à parcourir. Il existe également d'autres caméras, qui, cependant, sont principalement utilisées pour des tâches scientifiques, je m'abstiendrai donc de décrire leur fonctionnement.

Dans la plupart des cas, les navcams sont utilisées pour évaluer visuellement la section de piste du mobile. Les images qu'ils reçoivent peuvent être considérées comme une «image» tridimensionnelle sur Terre. La NASA a développé un logiciel spécialisé conçu pour visualiser la zone autour du rover et pour créer un modèle virtuel du rover et de la zone autour de lui. Ce modèle virtuel est utilisé pour tester les actions planifiées par l'opérateur. Si l'émulation s'est bien déroulée, les commandes peuvent être envoyées sur Mars. Ainsi, les scientifiques s'épargnent les éventuelles conséquences négatives de l'envoi d'une commande non vérifiée.
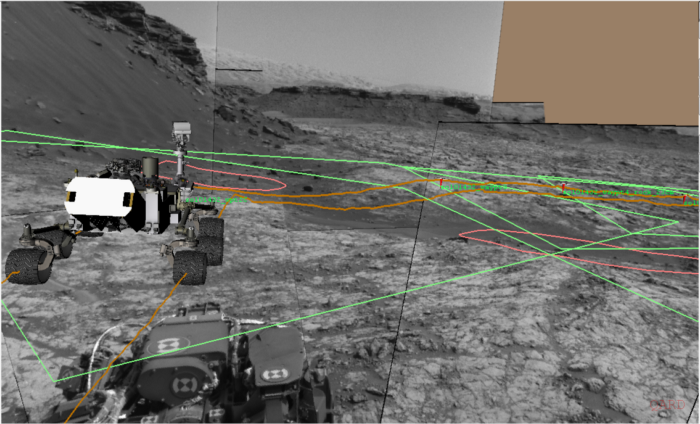
Voici à quoi ressemble le mouvement simulé du rover une fois que le modèle est complètement prêt. Les zones grises sont la section de Mars que le rover traversera dans un proche avenir. Les lignes orange-marron sont, en fait, la trajectoire du rover. Environ 30 mètres de surface sont modélisés par jour, les caméras ne peuvent tout simplement pas collecter plus d'informations, donc le rover voyage autant.
Et voici la superposition de la trajectoire simulée du rover sur les images réelles obtenues par les caméras de navigation.
Lors de la planification du mouvement du rover, plusieurs points importants doivent être pris en compte. Par exemple, la taille des objets en cours de route. La taille maximale que le rover peut gérer est d'environ 50 cm. Tout ce qui est plus grand doit être arrondi. Le sable (ce n'est pas exactement du sable, mais appelons-le ainsi) est également souhaitable pour se courber: s'il y en a beaucoup, le rover peut rester coincé. Même les petits morceaux de roche sont dangereux car leurs arêtes vives endommageront les roues du rover.
Rapide, lent ou lent?
Une fois que les scientifiques ont décidé de la direction du mouvement, vous devez comprendre exactement comment vous déplacer. Il existe trois modes: mode aveugle, odométrie visuelle et autonav.
Le mode aveugle est le mouvement le plus simple possible. Dans ce cas, le rover suivra les instructions envoyées depuis la Terre, et ne fera attention à rien. Idéalement, c'est une excellente méthode pour naviguer sur un rover, mais les conditions sur Mars sont loin d'être idéales. Souvent, des facteurs externes influencent la progression vers l'objectif. Il peut s'agir, par exemple, de roues coulissantes en surface, de sorte que le rover, au lieu de se déplacer de 10 mètres, se déplace de 9 voire 5.
Un excellent moyen de comprendre ce qu'est la direction aveugle est de fermer les yeux et d'essayer de suivre un certain chemin. Par exemple, 7 mètres en avant, puis tournez de 30 degrés vers la gauche et marchez encore 4 mètres. Dans ce cas, nous n'avons aucune idée de ce qui se passe autour et nous ne nous adaptons pas aux conditions changeantes.
En général, la direction à l'aveugle n'est pas la meilleure option, mais elle permet au rover de se déplacer rapidement, car le système n'a pas besoin de s'arrêter pour prendre des photos. À vitesse maximale, le rover peut parcourir la longueur d'un terrain de football en une heure seulement. Mais cette option n'est choisie que s'il n'y a pas d'objets potentiellement dangereux autour.
Odométrie visuelleutilisé plus souvent par les opérateurs. Dans ce cas, le rover s'arrête tous les mètres pour prendre une photo du sol avec des caméras. L'ordinateur de bord évalue ensuite l'image, la compare à la précédente et essaie de comprendre ce qui a changé autour d'elle, y compris l'emplacement du rover. L'ordinateur envoie ensuite de nouvelles commandes de navigation pour vous garder sur la bonne voie.
Cette méthode est similaire à la précédente, mais uniquement dans le processus de déplacement toutes les deux étapes, vous devez vous arrêter pour ouvrir les yeux et regarder autour de vous.
L'odométrie visuelle est un équilibre entre la vitesse et la précision du mouvement. La méthode est extrêmement importante car elle permet de détecter les obstacles sur la trajectoire du rover et de les éviter.
Navigation automatique, ou autonav, est la méthode la plus avancée sur le plan technologique. Cela peut être comparé à l'utilisation d'un drone dans une voiture. Nous nous fixons un objectif commun et le rover lui-même cherche un chemin sûr et rapide vers l'objectif. Le rover doit s'arrêter tous les mètres pour évaluer la situation à l'aide de caméras. Mais au lieu de prendre une seule photo avec des caméras de navigation, le rover utilise également des caméras Hazcam. Ensuite, l'ordinateur de bord combine toutes ces informations, formant une "carte des dangers". Les endroits problématiques sont marqués en rouge, les endroits où la situation n'est pas si grave sont marqués en jaune et la zone la plus appropriée pour promouvoir le routeur est marquée en vert.

C'est l'option de progression la plus lente pour un rover. Si, dans une situation idéale, le rover peut parcourir la longueur d'un terrain de football en utilisant la méthode à l'aveugle, comme mentionné ci-dessus (c'est environ 100 m), alors dans le cas du mode autonome, dans des conditions idéales, le rover ne parcourra que 30 mètres.
Dans le même temps, le rover ne peut pas détecter le sable ou les pierres pointues, la méthode n'est donc utilisée que lorsque la zone est absolument sûre.
Que pouvez-vous attendre de Perseverance?
La NASA s'attend à ce que le nouveau rover atterrisse à la surface de la planète dès le 18 février. Après cela, j'espère qu'il commencera à se déplacer sur Mars. Tout ce que j'ai dit ci-dessus s'applique au nouveau rover, mais il a plus de capacités. Par exemple, il pourra se déplacer au moins deux fois plus vite que Curiosity: le PC embarqué dispose de plus de ressources informatiques et d'algorithmes de traitement de données améliorés. Les caméras de navigation du robot sont colorées, elles reçoivent des images d'une résolution plus élevée que Curiosity. De plus, le rover a des roues plus épaisses que son prédécesseur et un dessin de bande de roulement différent. Les scientifiques pensent que les roues seront moins endommagées.
L'une des tâches les plus importantes pour le rover: collecter et stocker des échantillons pour le retour sur Terre. Beaucoup dépend du succès de cette mission. Et maintenant, lorsque le rover commencera à bouger, vous comprendrez quoi et comment ce mouvement est fourni.
Remarque: Evan Hilgemann est ingénieur mécanique au Jet Propulsion Laboratory (JPL) de la NASA.
