Dans cet article, j'essaierai de décrire l'essence de mon projet et de montrer le processus qui a découlé du croquis d'un chien robot pour commander des circuits imprimés pour un gant.
Début
Le gant est tout droit sorti de mon projet Mark et en est également une partie importante, vous devriez donc commencer par lui.
Le tout premier prototype du robot a été réalisé un soir de l'été 2018. C'était un robot à quatre pattes composé de 8 servos SG90 (bleu régulier) et de morceaux de clous. Tout cela était lié à la colle thermofusible et n'avait pas une seule chance de fonctionnement normal en raison de la très mauvaise répartition de la masse. Mais je ne le savais pas, et ce soir-là, je l'ai forcé à marcher en ligne droite, et 15 minutes plus tard, la planche à travers laquelle l'alimentation était fournie a commencé à fumer et un stabilisateur linéaire scellé est apparu sur la table (au fait, je n'ai pas compris ce qui s'est passé) ...
Je n'ai pas pu réparer ce tas de clous à colle chaude et de ruban électrique. Pour ma défense, je peux dire qu'à ce moment-là je ne savais pas souder, à partir de l'électronique j'ai seulement compris qu'il était impossible de fermer + et -, mais je n'avais pas entendu parler de l'existence de l'impression 3D.
À la fin de l'été, j'ai commandé ma première imprimante - Anet A8.
Imprimante ordinaire pour se familiariser avec la technologie: un cadre en acrylique, une cinématique avec "cloison sèche" et des moteurs bruyants (plutôt leurs pilotes)
Presque immédiatement après l'avoir acheté, j'ai maîtrisé tinkercad, où j'ai recréé ce robot sur 4 pattes, déjà en remplaçant les clous par du plastique et en ajoutant un servo rotatif.
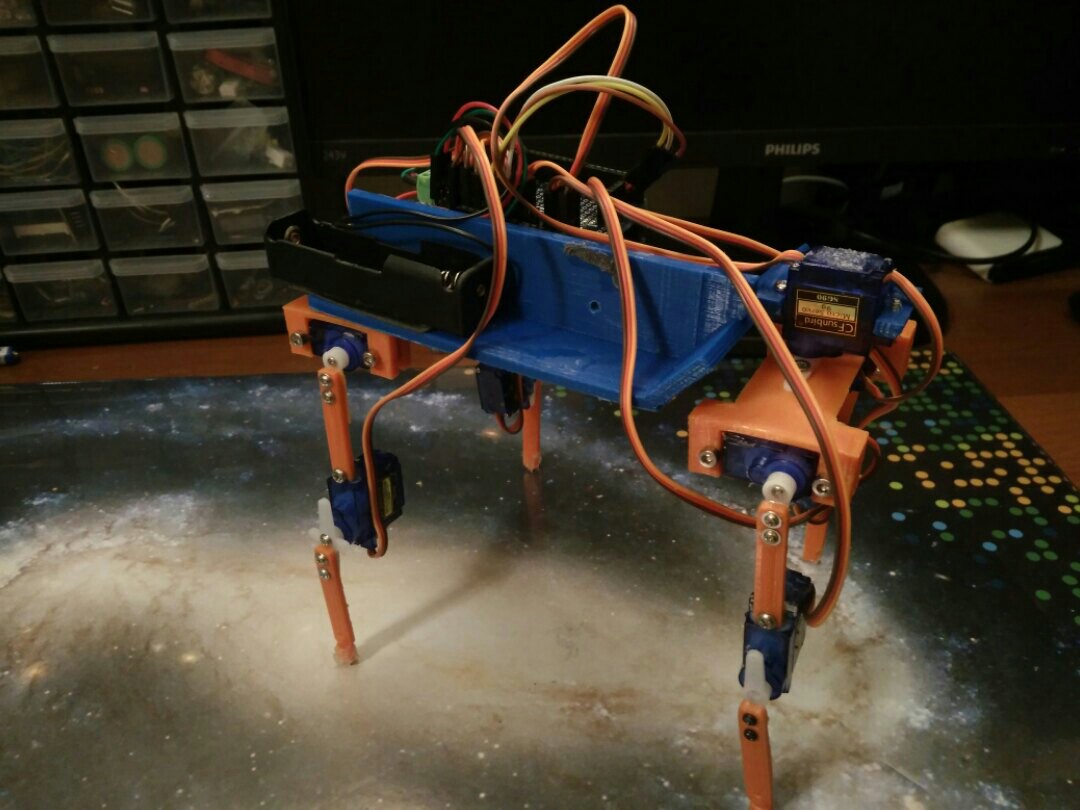
Cette création n'est jamais venue, mais elle m'a encouragé à créer d'autres versions. Je vais peut-être faire un article séparé pour mes robots à pieds de ver, alors je vais juste vous donner une séquence de photos des versions.
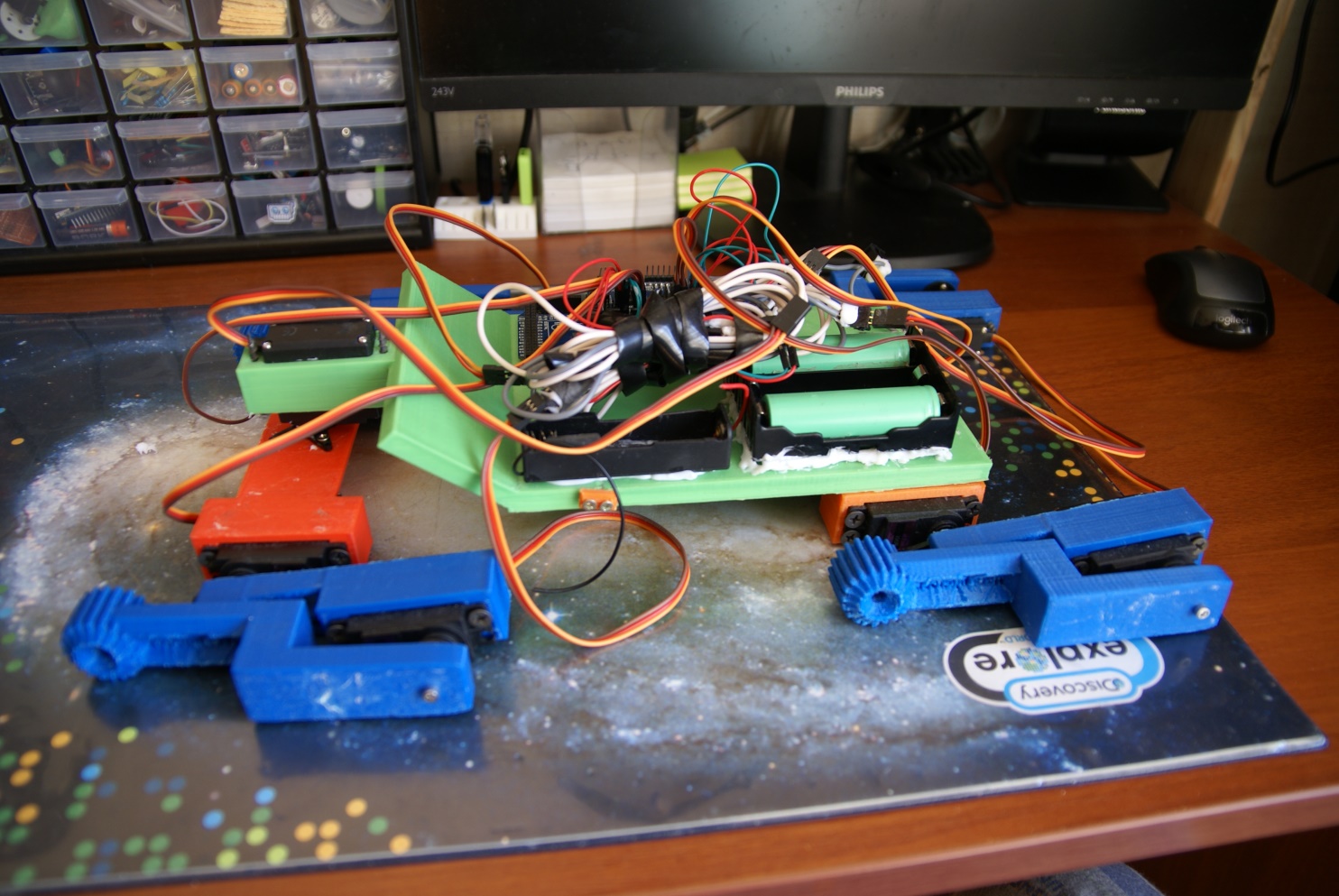

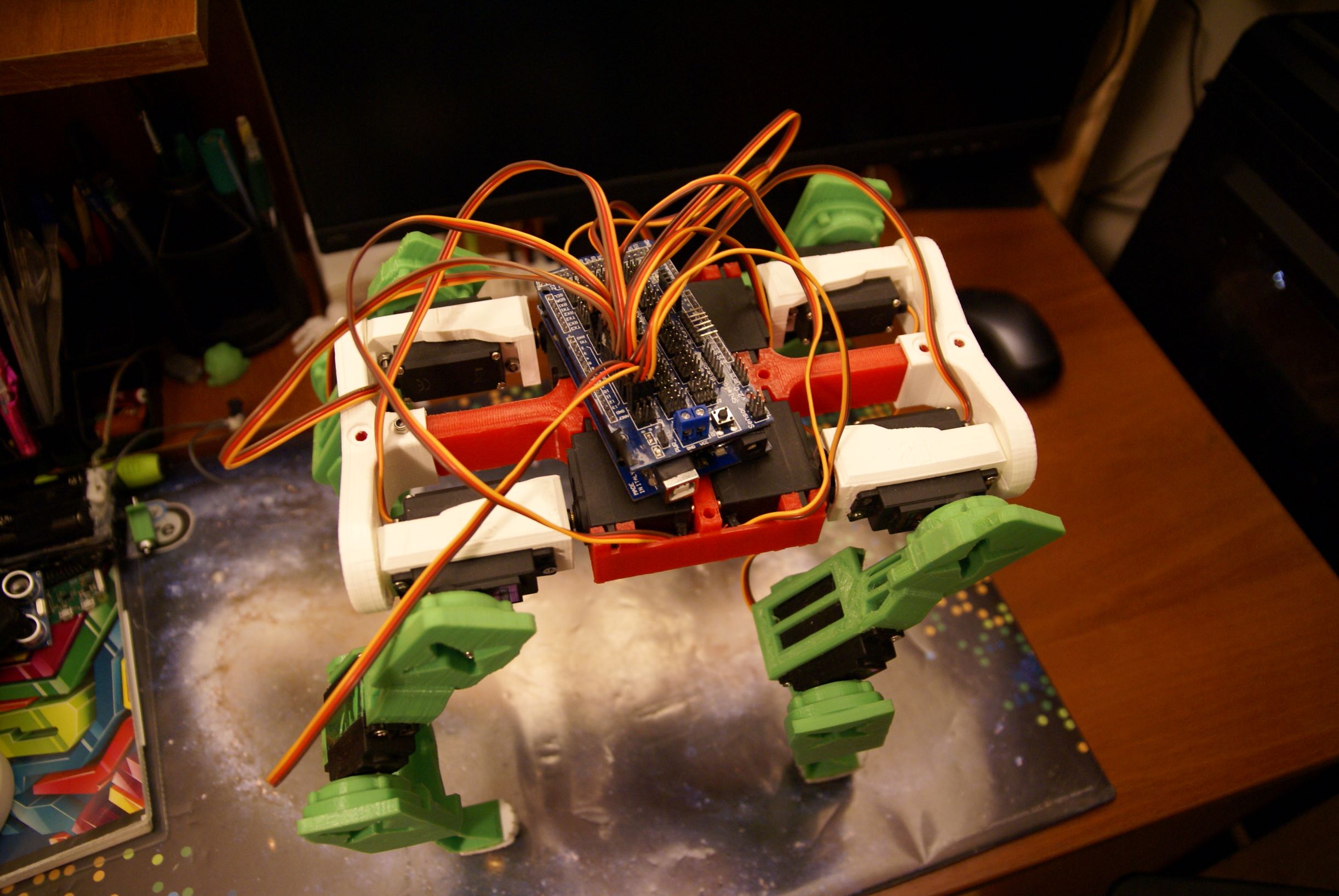
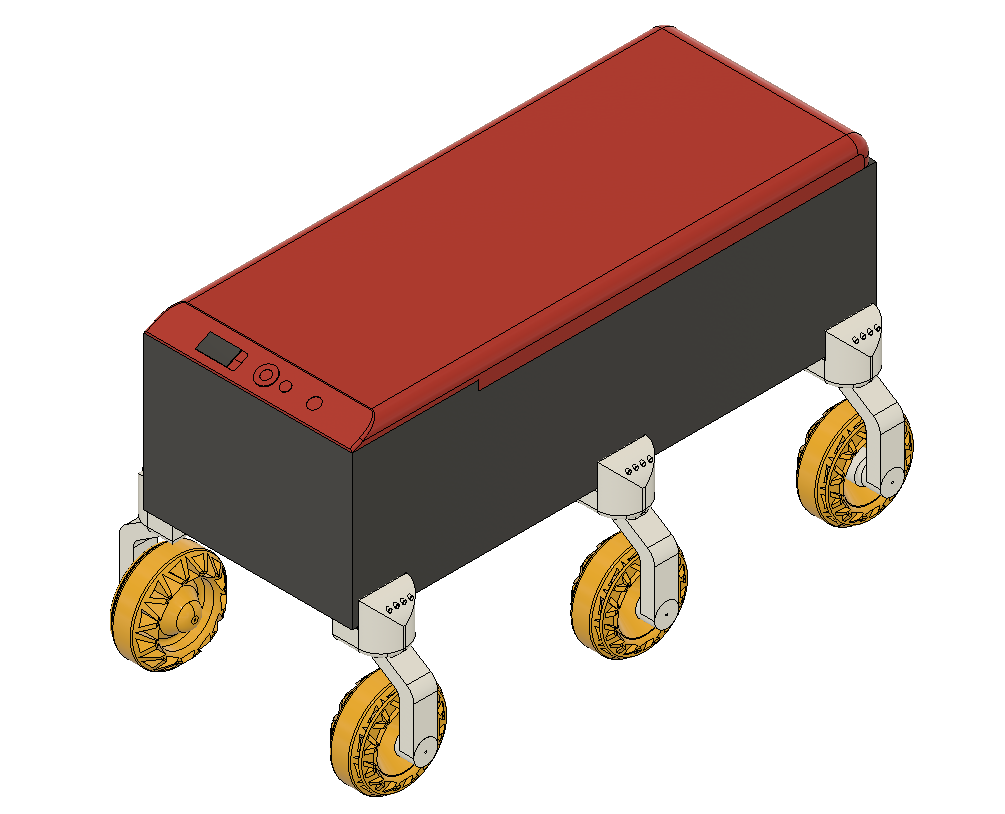
La dernière version est en train d'acquérir un corps, mais il marchait déjà normalement et a une bonne capacité de charge.
2 Mark. , . - , .
:
Mark - , - .
Mark 6 - , .
Mark 3 - , , 4 .
Mark 4 - , .
Mark 5 - 6 . .
Mark 7 - , Mark 5 .
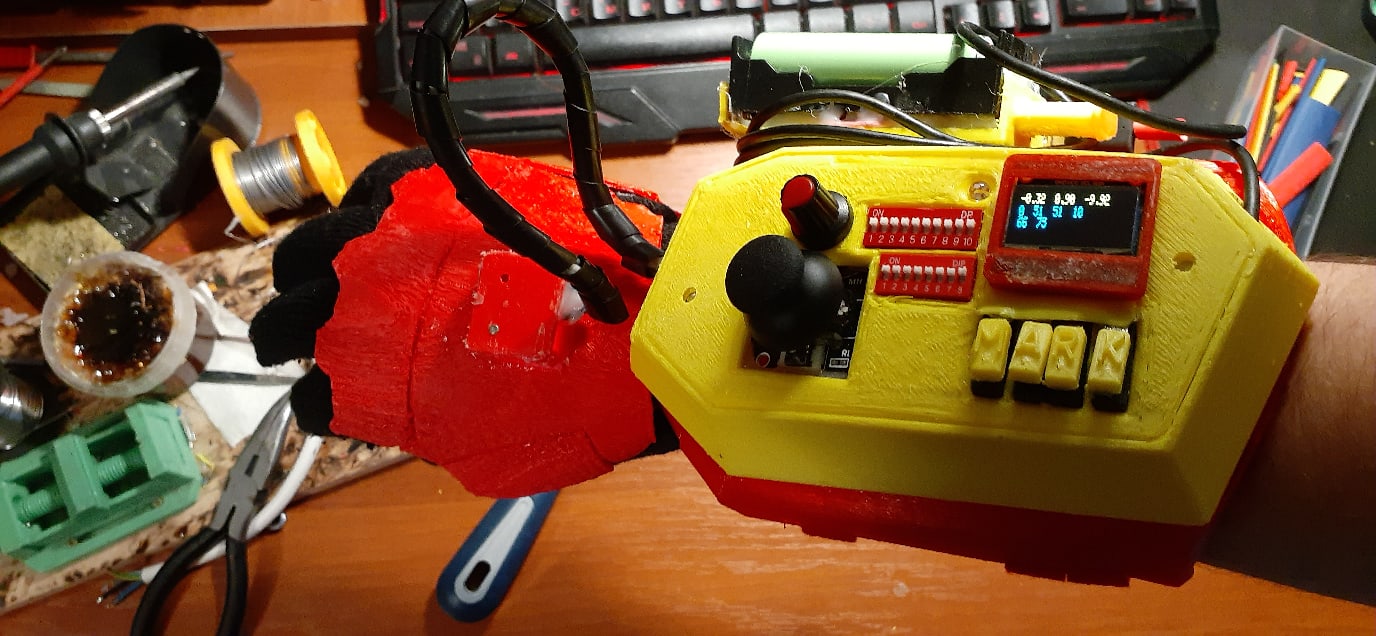
Mark gauntlet – .
Mark 6, Mark 4, Mark 3 Mark gauntlet.
Mark 6 ,
: 1
2020 , : 433 . ( , ) https://youtu.be/eEAHhr9Suug?t=194

: 2
2 , .

nrf24l01, . https://youtu.be/P_fq7KkfJrI
Rukami. 2-3 , .
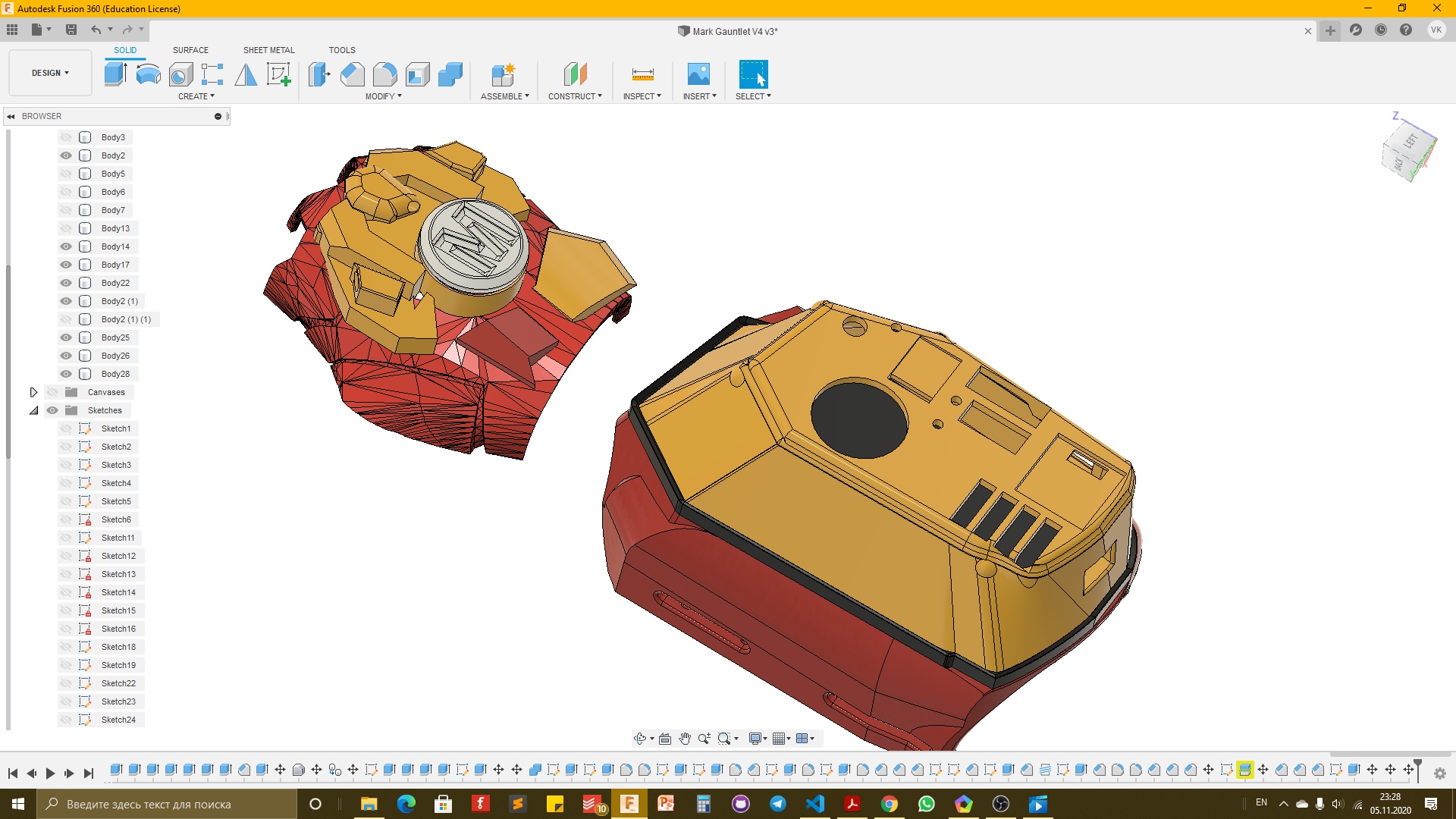
: 3 4
.
3 :
:
WiFi esp8266
NRF24l01+
433
Bluetooth
+
OLED
, - . https://youtu.be/52WvejA6dyk .
4 :
Atmega2560
:
:
WiFi
NRF24L01+
LoRa
MP3
- ( )
+
+
OLED
, 4.2
4.2
, ,
-
4
3 18650 3.4 * , . .
2 ,

, . LoRa . : https://github.com/Madjogger1202/Mark_GauntletV4.2/blob/main/src/main.cpp
.
/*
Hi stranger, this is main code file for this project
I'm not a 100% programmer, but i can make electronics work,
so i will be grateful if you add any features
it is fully opensource project, so anyone can build stuff based on this code
have a great time reading this badly written working code (^_^)
*/
#include <Arduino.h> // why not...
#include <Wire.h>
#include <SPI.h>
// i have to make all modules work, so i will use some libraris to make life easier
//1) Display. im using 0.96 oled from china, it is not standart at dimentions, bt i like how it looks in final designs :)
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h> // Adafruit librari works 50/50, it depends on display driver (yes, they can hava same names, bt diffrent drivers)
//2) RGB Led panel. LEDs 2812 (8-bit panel)
#include <microLED.h>
//3) NRF24L01+
#include <nRF24L01.h>
#include <RF24.h>
//4)APDC9960 usefull sensor
#include "Adafruit_APDS9960.h"
//5) LoRa radio sx1278
#include <RH_RF95.h>
//6) MPU6050 gyro + acsel
#include <Adafruit_Sensor.h>
#include <Adafruit_MPU6050.h>
//7) MP3 module
#include <DFPlayer_Mini_Mp3.h>
// first switches connection
int8_t first_sw[8] = { A14, A13, A12, A11, A10, A9, A8, A7 };
// second switches connection
int8_t second_sw[8] = { 38, 37, 36, 35, 34, A6, 32, A15 };
// buttons connection
int8_t buttons[4] = { A3, A1, A0, A2 };
#define LED1 10
#define LED2 11
#define JOY_X A6
#define JOY_Y A5
#define POT A4
#define LORA_D0 42
#define LORA_NSS 43
#define LORA_RST 44
#define NRF_CSN 40
#define NRF_CE 41
#define IR_LED 7
#define R_LED 4
#define G_LED 5
#define B_LED 6
#define WS_LED 45
LEDdata leds[8];
microLED strip(leds, 8, WS_LED);
#define ORDER_GRB
RF24 radio(NRF_CE, NRF_CSN);
Adafruit_MPU6050 mpu;
Adafruit_SSD1306 display(128, 32, &Wire, -1);
Adafruit_APDS9960 apds;
volatile bool irqMPU;
volatile bool irqAPDC;
struct allData
{
volatile boolean irqMPU;
volatile boolean irqAPDC;
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
uint8_t led1Mode;
uint8_t led2Mode;
uint8_t redLedMode;
uint8_t blueLedMode;
uint8_t greenLedMode;
uint8_t wsLedMode;
}mainData;
struct radioData
{
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
} telemetriData;
void readMode();
void readCh();
void readAcs();
void readJoy();
void readPot();
void readButtons();
void sendNRF();
void sendBL();
void sendLoRa(); // will reliase it soon
void displayInfo();
// at all it is possible to create up to 256 diffrent modes,
// but if you need more - connect mode counter with channel counter (maybe partly)
void n1Mode();
void n2Mode();
void n3Mode();
void n4Mode();
void n5Mode();
void n6Mode();
void n7Mode();
void n8Mode();
void n9Mode();
void n10Mode();
void n11Mode();
void n12Mode();
void acsel()
{
mainData.irqMPU=true;
}
void gesture()
{
mainData.irqAPDC=true;
}
void setup()
{
for(int i=0;i<8;i++)
pinMode(first_sw[i], INPUT_PULLUP);
for(int i=0;i<8;i++)
pinMode(second_sw[i], INPUT_PULLUP);
for(int i=0;i<4;i++)
pinMode(buttons[i], INPUT_PULLUP);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
analogWrite(LED1, 10);
analogWrite(LED2, 100);
pinMode(JOY_X, INPUT);
pinMode(JOY_Y, INPUT);
pinMode(POT, INPUT_PULLUP);
pinMode(LORA_D0, OUTPUT);
pinMode(LORA_NSS, OUTPUT);
pinMode(LORA_RST, OUTPUT);
pinMode(NRF_CSN, OUTPUT);
pinMode(NRF_CE, OUTPUT);
pinMode(IR_LED, OUTPUT);
pinMode(R_LED, OUTPUT);
pinMode(G_LED, OUTPUT);
pinMode(B_LED, OUTPUT);
pinMode(WS_LED, OUTPUT);
strip.setBrightness(130);
strip.clear();
strip.show();
strip.fill(mCOLOR(YELLOW));
strip.show();
Serial.begin(115200);
Serial2.begin(9600);
mp3_set_serial(Serial2);
mp3_set_volume(30);
mp3_play (1);
if (!mpu.begin())
Serial.println("Sensor init failed");
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
display.display();
display.clearDisplay();
display.display();
if(!apds.begin())
Serial.println("failed to initialize device! Please check your wiring.");
apds.enableProximity(true);
apds.enableGesture(true);
radio.begin();
radio.setChannel(100);
radio.setDataRate (RF24_1MBPS);
radio.setPALevel (RF24_PA_HIGH);
radio.openWritingPipe (0x1234567899LL);
radio.setAutoAck(false);
attachInterrupt(0, acsel, RISING);
attachInterrupt(1, gesture, RISING);
Serial1.begin(9600); // bluetooth module connected to Serial1
delay(5000);
mp3_stop ();
}
void loop()
{
readMode();
readCh();
readAcs();
readJoy();
readPot();
readButtons();
Serial.println(digitalRead(A14));
Serial.println(digitalRead(A13));
Serial.println(digitalRead(A12));
Serial.println(digitalRead(A11));
Serial.println(digitalRead(A10));
Serial.println(digitalRead(A9));
Serial.println(digitalRead(A8));
Serial.println(digitalRead(A7));
Serial.println();
Serial.println();
displayInfo();
switch (mainData.mode)
{
case 0:
n1Mode();
break;
case 2:
n2Mode();
break;
case 3:
n3Mode();
break;
case 4:
n4Mode();
break;
}
}
void readAcs() // reading acseleration values from sensor directly to main struct
{
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
mainData.x_acs = a.acceleration.x;
mainData.y_acs = a.acceleration.y;
mainData.z_acs = a.acceleration.z;
return;
}
void readJoy() // i am filering analog values for better perfomance
{
mainData.joyX = (analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X))/4;
mainData.joyY = (analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y))/4;
return;
}
void readPot()
{
mainData.potData = analogRead(POT);
return;
}
void readButtons() // buttons : 1) 1; 2)0; 3)1; 4)1; and mainData.button == 1011
{
mainData.button = !digitalRead(A1)*1000+!digitalRead(A2)*100+!digitalRead(A3)*10+!digitalRead(A0);
return;
}
void sendNRF()
{
// i am writing telemetri struct only when sending data
// in this case i can track how relevant telemetri data is
telemetriData.stable = mainData.stable;
telemetriData.x_acs = mainData.x_acs;
telemetriData.y_acs = mainData.y_acs;
telemetriData.z_acs = mainData.z_acs;
telemetriData.mode = mainData.mode;
telemetriData.channel = mainData.channel;
telemetriData.button = mainData.button;
telemetriData.potData = mainData.potData;
telemetriData.joyX = mainData.joyX;
telemetriData.joyY = mainData.joyY;
radio.write(&telemetriData, sizeof(telemetriData));
}
void sendBL(String inp)
{
Serial1.print(inp);
return;
}
// void sendLoRa();
void displayInfo()
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
display.print(mainData.channel);
display.print(" ");
display.print(mainData.mode);
display.print(" ");
display.println(mainData.z_acs);
display.print(mainData.button);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.println(mainData.potData);
display.display();
}
void readMode()
{
bitWrite(mainData.mode, 0, (!digitalRead(A14)));
bitWrite(mainData.mode, 1, (!digitalRead(A13)));
bitWrite(mainData.mode, 2, (!digitalRead(A12)));
bitWrite(mainData.mode, 3, (!digitalRead(A11)));
bitWrite(mainData.mode, 4, (!digitalRead(A10)));
bitWrite(mainData.mode, 5, (!digitalRead(A9)));
bitWrite(mainData.mode, 6, (!digitalRead(A8)));
bitWrite(mainData.mode, 7, (!digitalRead(A7)));
return;
}
void readCh()
{
bitWrite(mainData.channel, 0, digitalRead(second_sw[0]));
bitWrite(mainData.channel, 1, digitalRead(second_sw[1]));
bitWrite(mainData.channel, 2, digitalRead(second_sw[2]));
bitWrite(mainData.channel, 3, digitalRead(second_sw[3]));
bitWrite(mainData.channel, 4, digitalRead(second_sw[4]));
bitWrite(mainData.channel, 5, digitalRead(second_sw[5]));
bitWrite(mainData.channel, 6, digitalRead(second_sw[6]));
bitWrite(mainData.channel, 7, digitalRead(second_sw[7]));
return;
}
void n1Mode()
{
sendNRF();
digitalWrite(LED1, !digitalRead(LED1)); // just blink to understand, that it is working
}
void n2Mode()
{
}
void n3Mode()
{
}
void n4Mode()
{
}
void n5Mode()
{
}
void n6Mode()
{
}
void n7Mode()
{
}
void n8Mode()
{
}
void n9Mode()
{
}
void n10Mode()
{
}
void n11Mode()
{
}
void n12Mode()
{
}