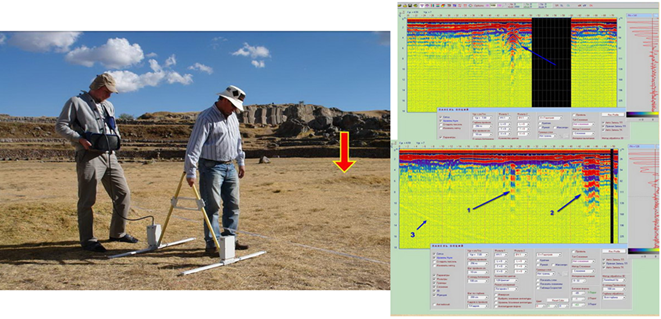
Il y a environ 10 ans, je suis tombé sur un certain nombre d'études où un appareil était utilisé pour voir ce qui était sous terre - le georadar. Pendant une semaine, je n'ai pas pu m'arracher, j'ai regardé une énorme quantité de matériel vidéo, je me souviens du nom de l'appareil utilisé par les chercheurs - le LOZA GPR. Ci-dessous, un exemple d'étude de Sacsayhuamana (Pérou), où des cryptes souterraines, des fosses, une dalle située à une profondeur ont été trouvées, et on peut également supposer qu'un fond en forme de bol a été une fois rempli.
Ma première pensée a été: «Wow, c'est cool! Vous pouvez donc trouver beaucoup de choses intéressantes sous terre. Et il n'y a pas d'autre moyen! " Ce fut le début de mon intérêt pour cet appareil. Il est rapidement devenu clair que cela coûtait quelques millions de roubles, c'est-à-dire que tout le monde ne pouvait pas se le permettre. J'ai commencé à réfléchir à la manière dont je pourrais fabriquer moi-même un tel appareil.
À partir des informations sur Internet, j'ai eu une idée du fonctionnement de l'appareil. Il y a un émetteur et un récepteur. L'émetteur envoie une impulsion électromagnétique nanoseconde très puissante, sous plusieurs dizaines de kilovolts, profondément dans la terre.
Dans les endroits où la constante diélectrique du milieu change, c'est-à-dire le type de sol change, sa teneur en humidité, ou une inclusion étrangère, une cavité d'air, une partie de ce signal est réfléchie. Une autre partie du signal va plus loin, plus profondément et est réfléchie par une couche ou un objet suivant.
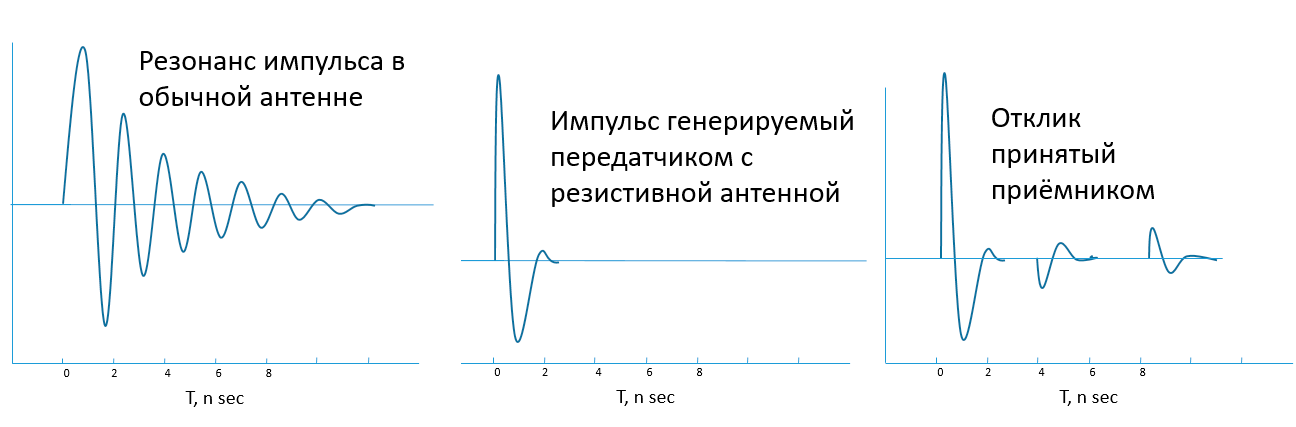
 Diverses sources ont souligné que des antennes dites résistives (résistives) sont utilisées dans le GPR. Ce sont des antennes spéciales qui n'ont pas de «sonnerie» - elles ne résonnent pas. Une antenne conventionnelle (Fig. 1) résonne (commence à être forcée à vibrer) à sa propre fréquence de fonctionnement. Ses propres oscillations ne lui permettent pas de percevoir qualitativement les signaux utiles qui arrivent à ce moment. Les impulsions envoyées par une antenne résistive diffèrent de l'impulsion radio classique par l'absence de fréquence porteuse - des impulsions courtes asymétriques sont obtenues (Fig. 2). Si une impulsion est réfléchie par un milieu avec une constante diélectrique plus élevée, elle est inversée (Fig. 3). J'ai commencé à comprendre comment fabriquer de telles antennes.
Diverses sources ont souligné que des antennes dites résistives (résistives) sont utilisées dans le GPR. Ce sont des antennes spéciales qui n'ont pas de «sonnerie» - elles ne résonnent pas. Une antenne conventionnelle (Fig. 1) résonne (commence à être forcée à vibrer) à sa propre fréquence de fonctionnement. Ses propres oscillations ne lui permettent pas de percevoir qualitativement les signaux utiles qui arrivent à ce moment. Les impulsions envoyées par une antenne résistive diffèrent de l'impulsion radio classique par l'absence de fréquence porteuse - des impulsions courtes asymétriques sont obtenues (Fig. 2). Si une impulsion est réfléchie par un milieu avec une constante diélectrique plus élevée, elle est inversée (Fig. 3). J'ai commencé à comprendre comment fabriquer de telles antennes.
L'appareil lui-même promettait également des investissements: «Cet appareil est si cher, car il existe probablement des ADC ultra-rapides très coûteux qui permettent de mesurer très rapidement et avec une grande précision l'amplitude du signal - c'est déjà plusieurs milliers de dollars; sans parler d'un processeur puissant », ai-je pensé.
Imaginez que de puissantes impulsions de 10 kilovolts d'une durée de 1 nanoseconde se succèdent, rebondissant à plusieurs reprises. La tâche principale est de numériser rapidement toutes les informations qui arrivent au récepteur (conversion d'un signal analogique à «compréhensible» en électronique, symboles possibles pour un traitement ultérieur - des zéros et des uns), analyser et enregistrer. Et ce sont des gigaoctets de zéros et de uns par seconde dans un flux continu.
«J'implémente cet appareil sur des comparateurs pour commencer. Des centimes et de multiples réductions de prix »- j'ai décidé. Un comparateur est un circuit électronique très basique dont le seul but est de comparer deux signaux analogiques entrants. Il émet 0 ou 1 à la sortie, selon laquelle des deux tensions entrantes est la plus élevée. Autrement dit, un comparateur est un convertisseur analogique-numérique (ADC) 1 bit qui peut enregistrer une forme d'onde binaire. Cependant, pour reconstruire l'amplitude complète d'une seule impulsion de retour au sol, des centaines de ces comparaisons avec différents seuils de comparaison sont nécessaires. Ma solution super-budget ne pouvait pas se vanter de rapidité et d'efficacité.
En général, j'ai lentement réfléchi aux approches de la mise en œuvre de l'appareil jusqu'à ce que je rencontre Vladimir Zubov et que je commence sérieusement à faire de la rétro-ingénierie du séquenceur d'ADN, sur lequel j'ai ensuite publié un article sur habr.com . Pendant tout ce temps, j'ai continué à suivre la recherche GPR avec intérêt, mais il n'y avait pas assez de temps pour tout. Imaginez ma surprise lorsqu'une chaîne d'événements aléatoires m'a conduit au même point d'un tout autre côté.
 Il y a trois ou quatre ans, j'ai déménagé pour vivre près de Troitsk. Juste à ce moment-là, j'ai publié
un article sur le séquenceur, j'étais assis là à trier les messages entrants. Jonathan Rothberg lui-même
m'a proposé une start-up, mais quelque chose a mal tourné, il y avait beaucoup d'autres messages entrants chronophages - en général, j'étais complètement immergé dans les conséquences de la publication. Non loin de notre maison sur le terrain il y avait d'énormes antennes sur mâts (enfin, très saines), nous y allions souvent avec un quadricoptère. Je me suis intéressé à eux, j'ai commencé à rechercher sur Google "grandes antennes, Troitsk", je suis tombé sur le site
rk3b.ru avec le nom intrigant "School Space Communication Center", j'ai appelé là-bas et j'ai demandé à visiter - le radioamateur lui-même.
Il y a trois ou quatre ans, j'ai déménagé pour vivre près de Troitsk. Juste à ce moment-là, j'ai publié
un article sur le séquenceur, j'étais assis là à trier les messages entrants. Jonathan Rothberg lui-même
m'a proposé une start-up, mais quelque chose a mal tourné, il y avait beaucoup d'autres messages entrants chronophages - en général, j'étais complètement immergé dans les conséquences de la publication. Non loin de notre maison sur le terrain il y avait d'énormes antennes sur mâts (enfin, très saines), nous y allions souvent avec un quadricoptère. Je me suis intéressé à eux, j'ai commencé à rechercher sur Google "grandes antennes, Troitsk", je suis tombé sur le site
rk3b.ru avec le nom intrigant "School Space Communication Center", j'ai appelé là-bas et j'ai demandé à visiter - le radioamateur lui-même.
 C'est ainsi que j'ai rencontré Alexander Nikolaevich Zaitsev, la personne la plus honorée qui a dirigé ce centre. Il s'est avéré que pendant de nombreuses années, il étudiait la magnétosphère terrestre à IZMIRAN et connaissait en même temps toute l'élite scientifique de Troitsk. Nous avons parlé, j'ai évoqué, entre autres, mon intérêt pour le GPR. Alexander Nikolaevich, à son tour, m'a parlé des antennes sur le terrain. Ils se sont avérés être purement amateurs: le radioamateur bien connu V.N.Komarov, étant en même temps un entrepreneur à succès, a réuni une équipe de passionnés de communication HF, avec son propre argent a créé un supercentre et des antennes telles qu'ils sont devenus les meilleurs sur les ondes. Ceci est confirmé par les premières places dans les compétitions pour le championnat du monde HF.
C'est ainsi que j'ai rencontré Alexander Nikolaevich Zaitsev, la personne la plus honorée qui a dirigé ce centre. Il s'est avéré que pendant de nombreuses années, il étudiait la magnétosphère terrestre à IZMIRAN et connaissait en même temps toute l'élite scientifique de Troitsk. Nous avons parlé, j'ai évoqué, entre autres, mon intérêt pour le GPR. Alexander Nikolaevich, à son tour, m'a parlé des antennes sur le terrain. Ils se sont avérés être purement amateurs: le radioamateur bien connu V.N.Komarov, étant en même temps un entrepreneur à succès, a réuni une équipe de passionnés de communication HF, avec son propre argent a créé un supercentre et des antennes telles qu'ils sont devenus les meilleurs sur les ondes. Ceci est confirmé par les premières places dans les compétitions pour le championnat du monde HF.
Et après un certain temps, A. Zaitsev m'a présenté des gens de VNIISMI Company LLC, qui (surprise! :) étaient engagés dans le LOZA GPR. J'ai rencontré P. Morozov et A. Berkut, qui l'ont dirigé. Ils m'ont accepté avec joie et nous nous sommes entendus à bien des égards. Imaginez ma stupéfaction quand ils ont dit que leur appareil, le LOZA GPR, vendu au prix de 25 000 $ dans la configuration de base, fonctionne sur des comparateurs. Et ils ont juste rêvé pendant très longtemps de fabriquer un appareil sur un convertisseur analogique-numérique (ADC), ce qui permettrait à l'appareil de fonctionner rapidement. Et que les tentatives étaient différentes, mais elles n'ont pas été couronnées de succès. En général, ils ont exprimé leur plein intérêt pour le développement.
Par la suite, j'ai reçu des informations complètes sur le fonctionnement du georadar LOZA. Il n'y avait vraiment que des comparateurs et quelques microcircuits, dont le meilleur était cependant le plus avancé de la famille FPGA il y a 20 ans. La principale plainte de VNIISMI concernant son appareil est devenue claire: j'étais fatigué d'appuyer sur le bouton avec mon doigt. Après tout, ce qui fonctionne sur les comparateurs: pour une mesure (mesure en un point), 128 impulsions doivent être envoyées séquentiellement au sol, ce qui prend de quelques secondes à 2 minutes, selon l'émetteur. Autrement dit, l'appareil fonctionne selon le principe: appuyez sur le bouton, restez debout et attendez, déplacez l'appareil plus loin le long du ruban à mesurer de 10 cm (le ruban à mesurer est vraiment étalé sur le sol pour se déplacer par incréments de 10 cm), etc. Pouvez-vous imaginer la vitesse d'un tel travail? À propos, l'unité de contrôle ou l'ordinateur est connecté à l'émetteur avec un fil,donc, un minimum de 2 personnes est requis pour le tournage: celui qui déplace le géoradar, et l'opérateur qui le suit sur un fil.
 J'ai également eu l'occasion d'étudier plusieurs géoradars différents - des appareils série et des prototypes de différents fabricants et développeurs.
J'ai également eu l'occasion d'étudier plusieurs géoradars différents - des appareils série et des prototypes de différents fabricants et développeurs.
Par exemple, cette grosse caisse lourde pèse environ 5 kilogrammes; à l'intérieur, il y a un ADC pour 1800 Megasamples par seconde, chaque carte dans un boîtier séparé et avec un écran séparé - en conséquence, beaucoup de poids excessif et de grandes dimensions, qui ont rendu le prototype impossible à utiliser en principe; il n'a pas travaillé.
Un autre prototype a eu plus de succès, mais le problème était que sa mise en place était très longue; parfois il ne s'est pas allumé, il s'est écrasé. En général, l'un des problèmes d'un GPR est la nécessité de fonctionner dans une très grande plage dynamique. L'impulsion qui est envoyée sous terre, lorsqu'elle la traverse, se désintègre très rapidement. Pour voir à la fois la première réponse de cette impulsion et la réponse qui est venue profondément du sol, vous avez besoin d'amplificateurs et de CAN capables de recevoir et de distinguer les signaux très forts et très, très faibles. Cette amplitude est appelée plage dynamique. Dans ce prototype, un amplificateur à deux canaux a été utilisé pour cela - un canal d'amplification fonctionnait avec des signaux forts et l'autre avec des signaux faibles. Autrement dit, il y avait 2 canaux de numérisation qui, d'ailleurs, ne pouvaient en aucun cas être réunis. En ajustant le gain,l'appareil pouvait être ajusté à une certaine profondeur et il y voyait quelque chose. Mais pas plus haut, pas plus bas qu'un niveau donné, il n'a pas vu jusqu'à ce que vous le reconfiguriez en d'autres paramètres. De plus, le prototype avait une très haute sensibilité aux interférences.

J'ai donc commencé à concevoir mon propre appareil puissant et à haute vitesse. Le travail était énorme, mais il y avait de bonnes nouvelles: une partie du travail avait déjà été faite - comme base j'ai pris l'électronique que (ta-dam! .. :) J'ai développé pour le séquenceur d'ADN.
Les travaux sur le GPR et le progiciel ont duré environ un an. J'ai réalisé non seulement une automatisation complète, des vitesses élevées, la possibilité de contrôler le GPR à partir de n'importe quel appareil, j'ai réussi à créer, en fait, un noyau universel pour tout projet high-tech: système sur un module (Zturn) → système sur cristal Zynq → FPGA + CPU + Linux + Django + WebSockets + Javascript ... Je vais cependant laisser l'intrigue. Afin de ne pas fatiguer le lecteur, je publie la partie technique dans un article séparé.
 L'appareil que j'ai développé se compose de 2 appareils - un émetteur et un récepteur, chacun avec sa propre antenne. Maintenant, les dimensions des appareils sont de 22,2 x 14,6 x 5,5 cm, dans le prochain lot, il est prévu de réduire encore les dimensions. Pour la recherche à faible profondeur, des antennes de mesure standard sont utilisées. Selon la longueur et la puissance des antennes, la profondeur de sondage sur des sols favorables peut atteindre plusieurs centaines de mètres. Pour déplacer le GPR, un porte-mains, une plate-forme sur roues, des antennes pliables / flexibles à détection de profondeur avec des sièges pour le récepteur et l'émetteur peuvent être utilisés; pour spécial les tâches peuvent être créées par d'autres moyens de mouvement (par exemple, gonflable - pour l'étude d'objets sous-marins).
L'appareil que j'ai développé se compose de 2 appareils - un émetteur et un récepteur, chacun avec sa propre antenne. Maintenant, les dimensions des appareils sont de 22,2 x 14,6 x 5,5 cm, dans le prochain lot, il est prévu de réduire encore les dimensions. Pour la recherche à faible profondeur, des antennes de mesure standard sont utilisées. Selon la longueur et la puissance des antennes, la profondeur de sondage sur des sols favorables peut atteindre plusieurs centaines de mètres. Pour déplacer le GPR, un porte-mains, une plate-forme sur roues, des antennes pliables / flexibles à détection de profondeur avec des sièges pour le récepteur et l'émetteur peuvent être utilisés; pour spécial les tâches peuvent être créées par d'autres moyens de mouvement (par exemple, gonflable - pour l'étude d'objets sous-marins).
Une plate-forme avec un géoradar peut être attachée à un véhicule, le géoradar est capable d'effectuer des levés automatiques à des vitesses allant jusqu'à 40 km / h (ce que nous avons testé est probablement plus). Le mouvement de l'appareil est enregistré à l'aide d'un capteur de roue et d'un GPS. Tous les processus sont automatisés, l'appareil est facile à utiliser, ne nécessite pas d'opérateur supplémentaire et une personne peut gérer la prise de vue. Priorités: puissance, compacité, légèreté, refroidissement passif, possibilité de compléter avec différents moyens de déplacement et des antennes de puissance différente. Ces deux petits boîtiers peuvent devenir le cœur d'un complexe GPR de toute puissance. Plus ennuyeux, spécification:
• Gamme de fréquences (MHz) 1-300
• 1000 ( 36 / 1 )
• : ,
• 5
• 1
• : 1GSPS (1)
• 16
•
• 120
• ( ) 16000
•
• 64
• : , ( ), GPS,
• wifi . web , PC
• 4 , (+12 )
•
• 222 146 55 mm ( 2)
• 100Mhz (1,5), 200MHz (1). 10MHz (10), 25Mhz (6), 50Mhz (3) ( , ). – . , / . , , 500 .

Le géoradar est prêt à fonctionner immédiatement - après avoir appuyé sur le bouton «ON», le géoradar commencera à arpenter et à tout écrire dans la mémoire interne. Il peut fonctionner de manière totalement autonome, sans y connecter un opérateur.
L'appareil distribue le wi-fi, vous pouvez vous y connecter depuis n'importe quel ordinateur, tablette, téléphone via un navigateur Web. Vous êtes dirigé vers un programme qui vous permet de contrôler l'appareil, de modifier les paramètres, de voir la piste actuelle. La ligne du haut de l'interface contient différents états qui permettent de comprendre ce qui se passe en ce moment: tension de la batterie, température sur le processeur, heure, durée de fonctionnement, données GPS. Vous trouverez ci-dessous des onglets et des boutons pour régler les déclencheurs, les décalages, l'échelle logarithmique, le zoom, les modes de fonctionnement.
L'appareil peut effectuer une mesure en appuyant sur un bouton, ou par le temps, par exemple, toutes les 0,3 seconde, ou les mesures peuvent être synchronisées avec le fonctionnement de la roue, par exemple, chaque quart de tour de roue est déclenché, c'est-à-dire que l'émetteur envoie une impulsion et le récepteur la reçoit et écrit. Ce dernier mode est très pratique, car il vous permet de lier la plate-forme avec le GPR à la machine, par exemple, et d'effectuer des mesures uniformes quelle que soit la vitesse de déplacement.
 Le premier lancement a été réalisé avec des représentants de VNIISMI sur une route goudronnée en construction dans le sud-ouest de Moscou. Voici à quoi ressemblait l'installation de mon appareil: 2 antennes sur la plateforme au plus près du sol, la boîte blanche est l'émetteur, la noire est le récepteur.
Le premier lancement a été réalisé avec des représentants de VNIISMI sur une route goudronnée en construction dans le sud-ouest de Moscou. Voici à quoi ressemblait l'installation de mon appareil: 2 antennes sur la plateforme au plus près du sol, la boîte blanche est l'émetteur, la noire est le récepteur.
 Un endroit a été choisi à l'avance où les communications se situaient à différents endroits sous terre. Le plan était de déterminer ces points d'abord avec l'appareil Loza, puis de regarder au même endroit avec mon appareil. Pendant que VNIISMI ajustait mon appareil, j'ai fait un demi-tour et suis monté, et j'ai tout vu. Voici la première photo de mon appareil. Nous avons approché les ouvriers qui construisaient une route là-bas à ce moment-là et avons vérifié les résultats de nos enquêtes avec les cartes de communication dont ils disposaient - tout coïncidait, il y avait vraiment des tuyaux en plastique de 200 diamètre à 2 m de profondeur.
Un endroit a été choisi à l'avance où les communications se situaient à différents endroits sous terre. Le plan était de déterminer ces points d'abord avec l'appareil Loza, puis de regarder au même endroit avec mon appareil. Pendant que VNIISMI ajustait mon appareil, j'ai fait un demi-tour et suis monté, et j'ai tout vu. Voici la première photo de mon appareil. Nous avons approché les ouvriers qui construisaient une route là-bas à ce moment-là et avons vérifié les résultats de nos enquêtes avec les cartes de communication dont ils disposaient - tout coïncidait, il y avait vraiment des tuyaux en plastique de 200 diamètre à 2 m de profondeur.

L'image ci-dessous montre un morceau de la même séquence d'une route en construction. Sur la droite, vous voyez une barre qui se tortille - il s'agit d'un oscillogramme à impulsions. Le petit pic en haut est l'impulsion générée par l'émetteur, et tout ce qui se trouve en dessous est ce qui arrive au récepteur de toutes les directions, mais principalement du sous-sol. La grande image couleur à côté de l'oscillogramme d'impulsions est un ensemble de telles colonnes, c'est-à-dire que chaque colonne de pixels est une impulsion, seulement ici l'amplitude est convertie en couleur. La barre rouge en haut de l'image couleur est au niveau du sol. De plus, l'impulsion va dans le sol, et en dessous nous voyons tout ce qui est reflété et volé vers le récepteur. Les petites bosses bleu-rouge juste en dessous de la deuxième bande rouge sont les intersections des diagrammes d'antenne avec des objets de type tuyau ponctuels. C'est-à-dire dans les endroits où, dans le sens du mouvement de l'appareil, nous traversons des tuyaux,les tuyaux donnent une telle image radio, et à certains endroits, vous pouvez voir deux tuyaux si vous zoomez.
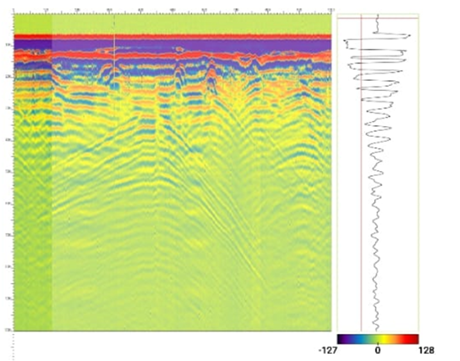 Ici aussi, vous pouvez voir de grandes paraboles floues qui descendent jusqu'à la fin de l'image - ce sont des reflets le long du canal d'air provenant de divers objets, dans ce cas, des lignes électriques qui se trouvaient à proximité. À mon avis, c'est un gros problème qui n'a pas encore trouvé de solution dans les développements que je connais. Les informations sur les réflexions en dehors de l'environnement étudié sont clairement superflues, elles détournent l'attention et interfèrent avec l'interprétation du signal utile, car il est constamment nécessaire d'analyser l'environnement et de décider si cette réflexion provient du sous-sol ou de l'air. Par conséquent, il est prévu d'utiliser des logiciels et du matériel pour minimiser les reflets dans l'air.
Ici aussi, vous pouvez voir de grandes paraboles floues qui descendent jusqu'à la fin de l'image - ce sont des reflets le long du canal d'air provenant de divers objets, dans ce cas, des lignes électriques qui se trouvaient à proximité. À mon avis, c'est un gros problème qui n'a pas encore trouvé de solution dans les développements que je connais. Les informations sur les réflexions en dehors de l'environnement étudié sont clairement superflues, elles détournent l'attention et interfèrent avec l'interprétation du signal utile, car il est constamment nécessaire d'analyser l'environnement et de décider si cette réflexion provient du sous-sol ou de l'air. Par conséquent, il est prévu d'utiliser des logiciels et du matériel pour minimiser les reflets dans l'air.
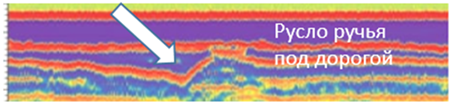 Ici, sur cette image - un ruisseau, enterré lors de la construction de la route; le chenal peut être vu à une profondeur d'environ 2 mètres. Ci-dessous dans cette section, il y avait aussi de grandes paraboles - des reflets des poteaux d'éclairage le long de la route.
Ici, sur cette image - un ruisseau, enterré lors de la construction de la route; le chenal peut être vu à une profondeur d'environ 2 mètres. Ci-dessous dans cette section, il y avait aussi de grandes paraboles - des reflets des poteaux d'éclairage le long de la route.
Près de chez moi, il y a une rivière Neznayka avec une géologie très intéressante, où tout est comme dans un manuel: il y a un ancien lit de rivière, des dépôts quaternaires, des alluvions, des terrasses fluviales. Là aussi, nous sommes allés avec les gars de VNIISMI, avons testé, comparé le travail de différents géoradars. Ici, à la fin, vous pouvez voir l'ancien lit de la rivière, et les grandes paraboles vertes sont le reflet de la clôture du village voisin sur des poteaux métalliques.
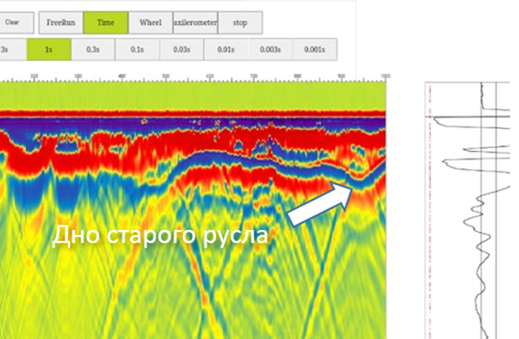 Comme vous pouvez le voir, seule une personne qui connaît déjà les principes d'interprétation de telles images déterminera immédiatement qu'il s'agit d'un lit de rivière et qu'il s'agit du reflet d'une clôture. Ainsi, la forme même de sortie de données limite considérablement le cercle des personnes qui peuvent facilement commencer à travailler avec GPR. Et ici, à mon avis, il y a une tâche très intéressante - traduire ces données en une image que tout utilisateur peut comprendre. Cette tâche peut être accomplie à l'aide de l'intelligence artificielle (réseaux de neurones), qui peut être entraînée pour marquer, désigner les contours réels des objets et assumer leur but et leurs propriétés. Les constructions volumétriques aideront également à résoudre le problème des données illisibles, mais nous en parlerons plus tard.
Comme vous pouvez le voir, seule une personne qui connaît déjà les principes d'interprétation de telles images déterminera immédiatement qu'il s'agit d'un lit de rivière et qu'il s'agit du reflet d'une clôture. Ainsi, la forme même de sortie de données limite considérablement le cercle des personnes qui peuvent facilement commencer à travailler avec GPR. Et ici, à mon avis, il y a une tâche très intéressante - traduire ces données en une image que tout utilisateur peut comprendre. Cette tâche peut être accomplie à l'aide de l'intelligence artificielle (réseaux de neurones), qui peut être entraînée pour marquer, désigner les contours réels des objets et assumer leur but et leurs propriétés. Les constructions volumétriques aideront également à résoudre le problème des données illisibles, mais nous en parlerons plus tard.
La photo ci-dessous montre un relief très intéressant (filmé le 22 juillet 2020 dans la région d'Ivanovo, village de Kalinkino): une sorte de structure oblongue est visible - il s'agit probablement d'une couche de sable ou d'un autre moins dense que le limon et le sol qui prévalent dans notre région. J'ai une idée pour automatiser entièrement l'identification des couches. Comme nous l'avons défini ci-dessus, l'onde est réfléchie par les endroits où la constante diélectrique du milieu change. On peut mesurer la vitesse de l'impulsion sur l'une ou l'autre des couches de cette image et assumer la composition de l'environnement et / ou le degré de son humidité.

À la fin de l'été, j'ai réussi à partir en expédition archéologique près de Riazan près du village de Terekhovo, district de Shilovsky, sur le site d'un camp / colonie du cinquième siècle. Là, à la convergence de deux rivières, il y a une colline envahie d'arbres - de nombreux témoignages indiquent qu'au cinquième siècle il y avait une colonie. Nous avons commencé à y marcher avec un géoradar - dans la première photo, notre trace GPS. Les arbres poussaient très densément au centre, nous pouvions marcher le long du périmètre, il y avait moins d'arbres plus loin et nous marchions tous assez densément. J'ai eu l'opportunité d'utiliser un programme qui a été annoncé comme un programme qui permet de construire un modèle 3D à partir de pénétrations linéaires. Les archéologues attendaient un tel résultat de ma part - «nous allons construire et voir clairement ce qui est enterré où». Il est préférable de faire de telles constructions à partir de zones bien (densément) entretenues.J'ai chargé la zone avec les passages les plus denses dans le programme et suis entré en mode 3D - le programme a construit un champ de barres de couleur qui pouvaient être "tirées" de haut en bas, en changeant les paramètres, je ne voyais plus de possibilités - après consultation, j'ai découvert que le programme ne construit que pseudo 3D.
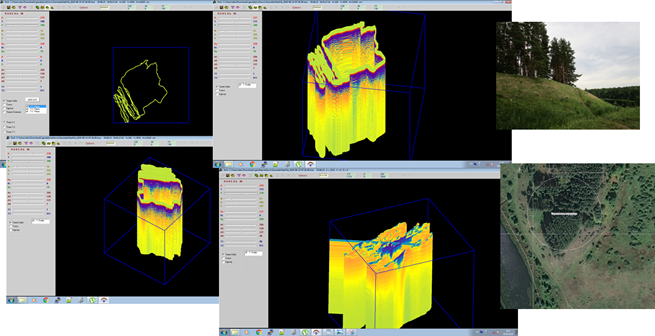
Imaginons que nous ayons des colonnes que nous connaissons, où le radar de pénétration du sol a voyagé d'en haut, et nous savons qu'il est verticalement vers le bas à ce point. La tâche suivante consiste à compléter les colonnes manquantes par approximation, ce que le programme a fait. Mais elle l'a fait ringard avec une grille le long de 2 axes. À la suite de cette construction, divers artefacts apparaissent - cruciformes, à partir de lignes horizontales et verticales. Si nous prenons une tranche d'un plan 3D, nous avons une image couleur d'une tranche de colonnes, que le programme tire simplement vers le haut ou vers le bas, en fonction de l'amplitude du signal.

La construction 3D réelle est un peu plus compliquée - à partir de points tirés physiquement à différentes profondeurs, nous devons identifier certains plans, des plans de transition de l'un à l'autre, puis, en utilisant l'interface utilisateur, être en mesure de sélectionner les plans individuels que nous devons afficher.
Construire un modèle volumétrique est généralement une tâche distincte très intéressante. Maintenant, je pense à l'idée d'utiliser une antenne avec un émetteur et 2 antennes avec des récepteurs espacés les uns des autres, c'est-à-dire 2 récepteurs. Il s'agit d'une sorte d'antenne réseau phasée. Au moment où le signal se déplace, plus précisément en fonction de la différence entre le moment où il a été reçu par les premier et deuxième récepteurs, vous pouvez déterminer l'endroit exact où ce signal a été réfléchi. Ainsi, en une mesure, en mesurant une seule impulsion, nous pouvons immédiatement construire une image dans un plan 2D. Le radar conventionnel utilise des fréquences porteuses, des transformées de Fourier, des tracés sinus et cosinus. Dans ce cas, d'excellents maths sont utilisés:Sur la base des données sur la réflexion d'une seule impulsion nanoseconde, nous faisons une convolution, puis calculons d'où provient cette impulsion avec quelle probabilité. Cette idée est maintenant au stade de l'écriture d'un logiciel, qui permettra immédiatement lors du passage de simuler une image 3D, ainsi que de mesurer la vitesse de l'impulsion en couches, ce qui nous permettra d'assumer immédiatement la composition et la qualité du support.
Où le GPR peut-il être utilisé?
Les couches les plus élevées sous la surface de la terre sont appelées la «couche culturelle» - c'est l'archéologie, les objets individuels, les fondations des bâtiments sont parfaitement visibles, même creusés et une fois les fosses visibles. Il y a donc un problème très intéressant associé, par exemple, au désert du Sahara. Le Sahara est en expansion et de nombreux archéologues conviennent que les villes et les bâtiments sont enterrés sous ses sables. Au temps de l'Égypte, il y avait une savane, des rivières coulaient, des animaux vivaient. GPR peut tout scanner jusqu'au sol et y trouver des bâtiments et des colonies. C'est en fait le seul appareil capable de le faire.
À propos, la profondeur de balayage dépend de la densité et du type de sol, de sa minéralisation et de sa teneur en humidité. Le sable est le sol dans lequel le GPR voit le plus profondément. Le deuxième milieu de ce type, qui est très perméable au GPR, est la glace. Ainsi, le GPR peut être utilisé pour le sondage souterrain des plans d'eau. Dans l'eau salée, la profondeur du sondage sera moins profonde, dans l'eau douce, elle sera plus profonde et le sondage le plus profond peut être fait dans la glace.
Une autre application de GPR est la recherche de services publics souterrains, de tuyaux, de passages, de tunnels. La qualité de la construction routière peut être contrôlée très efficacement - l'épaisseur du substrat de sable a été posée, si l'asphalte a été posé uniformément. Vous pouvez également vérifier l'état des fondations et des murs des bâtiments. Il est possible de surveiller l'état de la chaussée pendant l'exploitation afin de prendre des mesures en temps opportun en cas de dégradation de la route, la formation de cavités karstiques, alors que cela n'a pas encore conduit à une défaillance. L'érosion se produit sous les fondations des bâtiments et des structures. Ainsi, la raison de la marée noire à Norilsk était que les fondations du stockage de pétrole avaient été sapées. Des contrôles réguliers de ces objets contribueraient à prévenir avec succès de telles catastrophes.

Géologie. Lors des levés géoradars, les limites des rivières, les affleurements calcaires, où se trouvent les couches de roches, sont clairement visibles, les tuyaux de kimberlite, les moraines. Par des signes indirects, les eaux souterraines peuvent être déterminées. Ainsi, l'eau s'infiltre jusqu'à ce qu'elle rencontre une couche à travers laquelle elle ne peut pas s'infiltrer et s'accumule à la frontière des couches dans la plaine. Il est également possible de prévoir et de prévenir les coulées de boue, les glissements de terrain. Le GPR peut être utile dans l'exploration minière, y compris le forage.
En décembre 2020, la version de base de l'appareil a été testée et certifiée avec succès. Le radar de pénétration du sol s'appelait GEORA.
Le premier petit lot est en cours de préparation pour la libération. L'objectif est de commencer à acquérir une expérience plus large de l'utilisation pratique et, sur la base de cette expérience, d'identifier les opportunités d'améliorer la convivialité et les fonctionnalités. La deuxième tâche consiste à créer un logiciel de nouvelle génération qui rendra l'analyse des données visuelle et pratique même pour un utilisateur non préparé.
Deux versions sont prévues pour une large diffusion: pour un usage privé et pour un usage commercial. Il est possible de personnaliser l'équipement et le logiciel pour n'importe quelle tâche.
L'objectif global est de faire du géoradar une chose plus massive, abordable pour une personne intéressée par l'histoire et l'archéologie. Disponible pour les entrepreneurs individuels qui travaillent dans le domaine de la conception, de la construction, de l'expertise, de la recherche sur le sous-sol. L'adoption généralisée de l'instrument formera une communauté d'utilisateurs. Il est prévu de créer une base de données de mesures centralisée. Pour que n'importe qui, s'il le souhaite, puisse envoyer des données numérisées au serveur, les partager sur une base remboursable ou gratuite. De plus, un plus grand éventail de données permettra de former plus efficacement le réseau neuronal à interpréter les résultats de l'analyse et une visualisation compréhensible par une personne ordinaire.
Maintenant, la deuxième partie de l'article avec une description détaillée de la partie technique est en cours de préparation pour publication. C'est tout pour aujourd'hui, si vous êtes intéressé - écrivez, envoyez un courrier sokolov.labs@gmail.com . Au revoir à tous, merci pour votre attention!