
Il y a plusieurs années, des scientifiques de l'Université Ben-Gurion ont créé un robot compact - Rising STAR (RSTAR). Maintenant, il a un partenaire avec un design similaire - Big STAR (BSTAR), mais la taille du nouveau robot est 6 fois plus grande. Le tandem devrait augmenter la productivité, améliorer la polyvalence des robots et les rendre moins vulnérables. Le RSTAR et le BSTAR seront utilisés dans les opérations de recherche et de sauvetage lorsque des déplacements sont nécessaires sur des terrains hors route et accidentés.
Les robots STAR ont été créés par le scientifique David Zarrouk et ses collègues de l'Université Ben-Gurion. Dans ses premières créations, Zarruk a accordé une attention maximale à l'autonomie des structures. Les premières versions STAR se sont révélées vraiment assez autonomes et maniables. Les robots sont facilement transformés en fonction des conditions environnementales. Ainsi, RSTAR a des rotors - il peut contourner les obstacles. De plus, le robot dispose de réservoirs de natation gonflables. Voyant que la conception était réussie, l'équipe de développement a décidé d'aller plus loin. En conséquence, RSTAR a un frère aîné - BSTAR.
Fonctionnalités BIG STAR
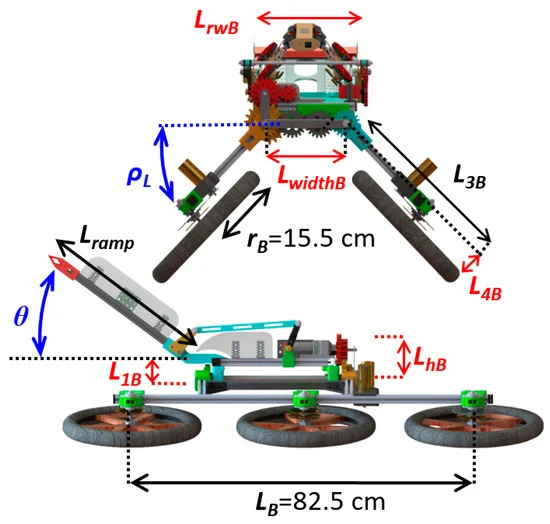
Le robot BSTAR présente les caractéristiques suivantes:
- vitesse de déplacement de la structure jusqu'à 1,4 m / s;
- charge utile du robot> 5 kg;
- longueur de la structure de l'axe de la roue arrière à l'axe de la roue avant - 82,5 cm;
- "queue" rétractable pour transporter RSTAR;
- structure coulissante;
- hauteur pliée minimale - 21 cm;
- 2 batteries lithium-polymère d'une capacité de 5200 mAh;
- poids - 9,8 kg.
Le robot est capable de se déplacer sur un terrain accidenté. La synergie entre le BSTAR et le RSTAR devrait accroître leurs capacités de navigation et de franchissement d'obstacles. De plus, un gros robot peut servir de chargeur pour un petit RSTAR.
robot BSTAR convient au transport d'un grand volume de charge utile: batteries, caméras, équipements de communication et autres capteurs pour les opérations de recherche et de sauvetage.
Le robot est contrôlé par un contrôleur Arduino Uno et deux contrôleurs RobotClaw ECS.
La première star israélienne

robot multifonctionnel RSTAR est apparu en 2018. En raison des changements de conception adaptatifs, il peut se déplacer sur des surfaces horizontales et verticales, ainsi que ramper ou rouler sur des roues. Le robot s'adapte rapidement aux conditions extérieures: il peut changer l'angle entre les cadres de roues, les déplacer parallèlement au corps d'avant en arrière.
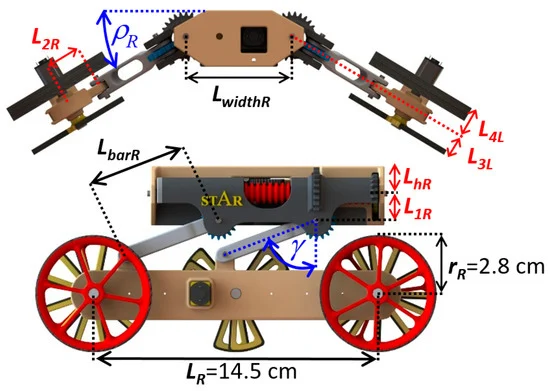
De plus, RSTAR peut modifier le centre de gravité. Il peut franchir un obstacle trop haut pour lui, puis déplacer le centre et le surmonter en toute sécurité.
En raison du fait que le robot a le mécanisme d'extension avec quatre tiges, il peut élargir la distance entre le corps et les jambes et se déplacer entre les murs.
Pour augmenter la mobilité, le robot peut être équipé de roues ou de supports à rayons. Il peut courir la tête en bas et, à l'aide d'une démarche d'escargot, ramper sur des obstacles plus grands que le diamètre de ses roues.
Le robot est équipé d'une batterie LiPO 800 mAh, mais il est prévu de le rendre plus autonome. La hauteur minimale du robot maniable est de 3,5 cm, ce qui lui permet de naviguer dans des endroits très étroits et difficiles à atteindre. La vitesse maximale du robot peut atteindre 0,8 m / s. La masse de la structure est de 0,38 kg.
Union de deux étoiles
D'une part, BSTAR et RSTAR ont des conceptions similaires, réalisées uniquement sur une échelle de 6 à 1. Cependant, en raison de la grande taille du BSTAR, certaines de ses pièces ont dû être remplacées .
BSTAR utilise un cadre en métal, tandis que RSTAR en utilise un en plastique.
Un nouvel élément de conception important du robot est sa «queue» rétractable - une plate-forme mobile à l'arrière. La plate-forme peut changer l'angle d'inclinaison dans les directions négative et positive. Le but principal de la "queue" est de transporter le petit RSTAR. Un total de 3 "enfants robotiques" peuvent tenir sur le site parent.
Le site peut être utilisé dans divers cas pour des manœuvres supplémentaires. Par exemple, RSTAR, entrant sur le site BSTAR, est capable d'inspecter les obstacles depuis une hauteur.
Comme mentionné ci-dessus, le bébé est chargé à partir de la batterie de son «parent».
Comme prévu, la collaboration de deux robots multifonctionnels devrait considérablement augmenter leur productivité, leur polyvalence, augmenter la vitesse d'exploration du terrain et élargir le champ des opérations possibles.
