La NASA a récemment révélé les détails du rover Ingenuity, qui a atterri à la surface de la planète rouge avec le rover. Bientôt, le rover tentera de maîtriser l'espace aérien de Mars, mais pour l'instant, la NASA parle des détails de ce voyage.
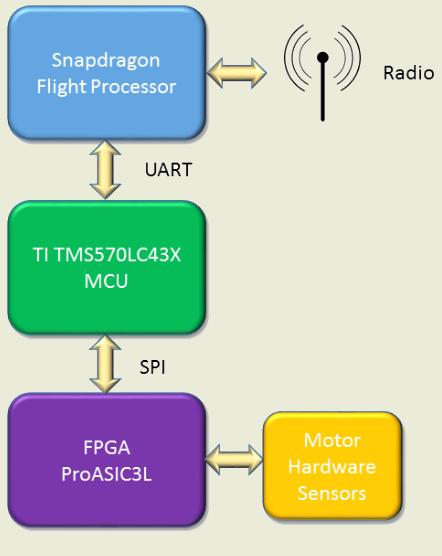
Ainsi, le "hardware" du Marsplane est basé sur une carte avec SoC Snapdragon 801 de Qualcomm. Logiciel - Linux et open source. C'est la première fois qu'un logiciel basé sur Linux est utilisé sur des systèmes envoyés sur Mars, a déclaré l'agence. L'utilisation d'éléments ouverts et accessibles, tant matériels que logiciels, permet aux passionnés de répéter le design ou de créer quelque chose de leur propre chef.
Le matériel offre les hautes performances dont un mobile a besoin. Le fait est que le vol normal nécessite le fonctionnement de la boucle de contrôle à une fréquence de 500 cycles par seconde, plus une analyse d'image à une fréquence de 30 images par seconde.
Le SoC Snapdragon 801 (quatre cœurs, 2,26 GHz, 2 Go de RAM, 32 Go de mémoire flash) est responsable du fonctionnement de l'environnement système de base basé sur Linux. C'est lui qui effectue des opérations de haut niveau, notamment:
• La navigation visuelle basée sur l'analyse des images de la caméra.
• Gestion de données.
• Traitement des commandes.
• Formation de la télémétrie.
• Maintenir un canal sans fil.
Grâce à l'interface UART, le processeur est connecté à deux microcontrôleurs, il s'agit de MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 Ko de RAM, 4 Mo de mémoire Flash, UART, SPI, GPIO. Ils sont responsables de diverses fonctions de contrôle de vol. De plus, ils sont également utilisés pour la redondance en cas de panne, afin que les informations qui leur parviennent soient dupliquées.
Un seul des microcontrôleurs est impliqué, mais si quelque chose ne va pas, le second entre en fonction, qui est capable d'intercepter immédiatement les fonctions principales, en remplaçant le "collègue" problématique. Eh bien, FPGA MicroSemi ProASIC3L est responsable du transfert d'informations des capteurs vers les microcontrôleurs, ainsi que de l'interaction avec les actionneurs qui contrôlent les pales du flyer à voilure tournante. Il bascule également sur un microcontrôleur de rechange en cas de panne.
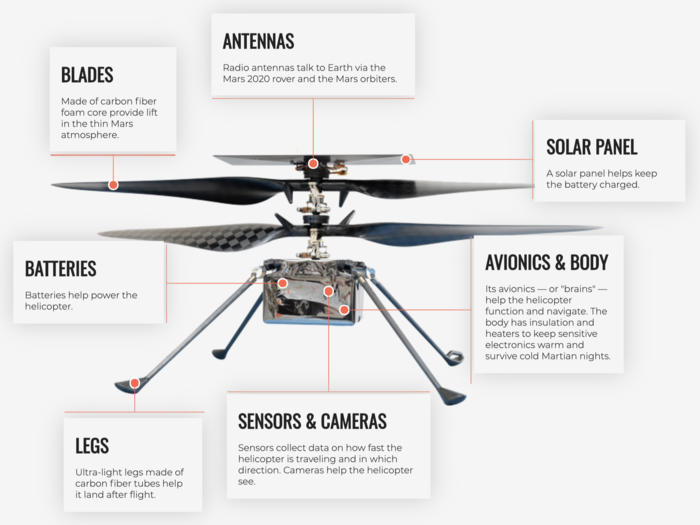
Dans notre article précédent, il était dit qu'il n'y avait aucun équipement scientifique dans cet appareil. Mais, bien sûr, il ne s’agit pas d’un simple flan. Le vaisseau spatial Mars est équipé d'un altimètre laser de SparkFun Electronics. Elle se spécialise dans le développement de logiciels open source, en plus, elle est également l'une des fondatrices du terme même OSHW, Open-source hardware. De plus, le rover est équipé de composants tels qu'un stabilisateur gyroscopique (IMU) et des caméras vidéo.
Il y a deux caméras. L'un d'eux, VGA, est utilisé comme appareil de navigation, il est chargé de déterminer la position, la direction du mouvement et la vitesse par comparaison image par image. Mais le deuxième appareil photo, couleur, 13 MP, sera utilisé pour photographier la zone. Photographie aérienne sur Mars - nous vivons dans le futur!
La plupart des systèmes de la fusée ont été développés par des spécialistes de la NASA, à savoir dans le laboratoire JPL (Jet Propulsion Laboratory) de la NASA. Dans le même temps, les composants utilisés dans la conception ne sont pas uniques, mais typiques, ils sont créés spécifiquement pour les petits et ultra petits satellites de la terre artificielle (cubsats) et se développent depuis plusieurs années dans le cadre de la plate-forme ouverte F Prime ( F´), distribué sous la licence Apache 2.0.
F Prime offre la possibilité de concevoir et de déployer rapidement des systèmes de commande de vol et des éléments logiciels associés. Ce faisant, le logiciel de vol est divisé en composants séparés avec des interfaces de programmation bien définies. De plus, les développeurs mettent à leur disposition un framework C ++ pour le traitement des files de messages, l'organisation du multithreading, ainsi que des outils de modélisation qui vous permettent de lier des composants et de générer automatiquement du code.
Et que fera un vaisseau spatial Mars sur Mars?
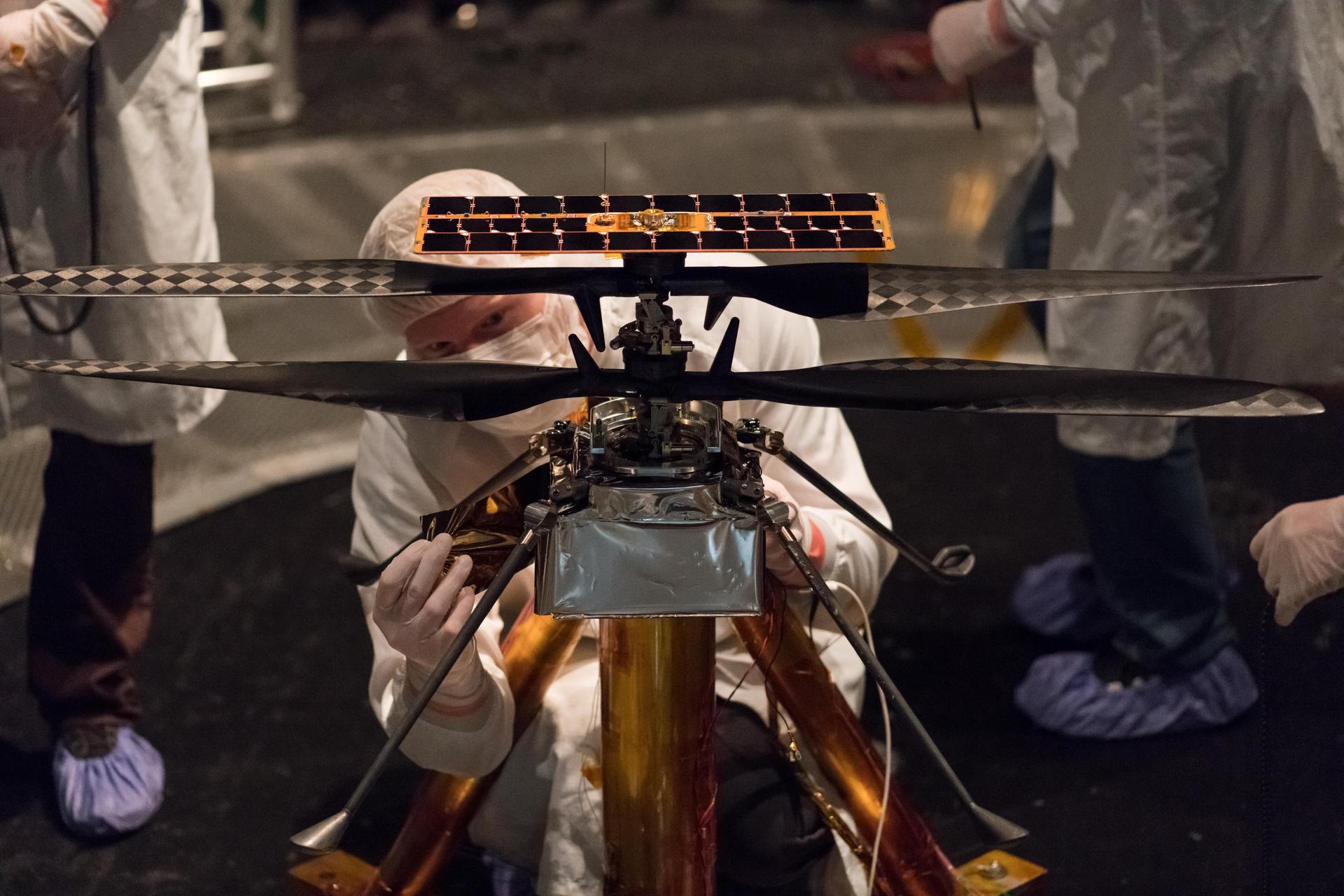
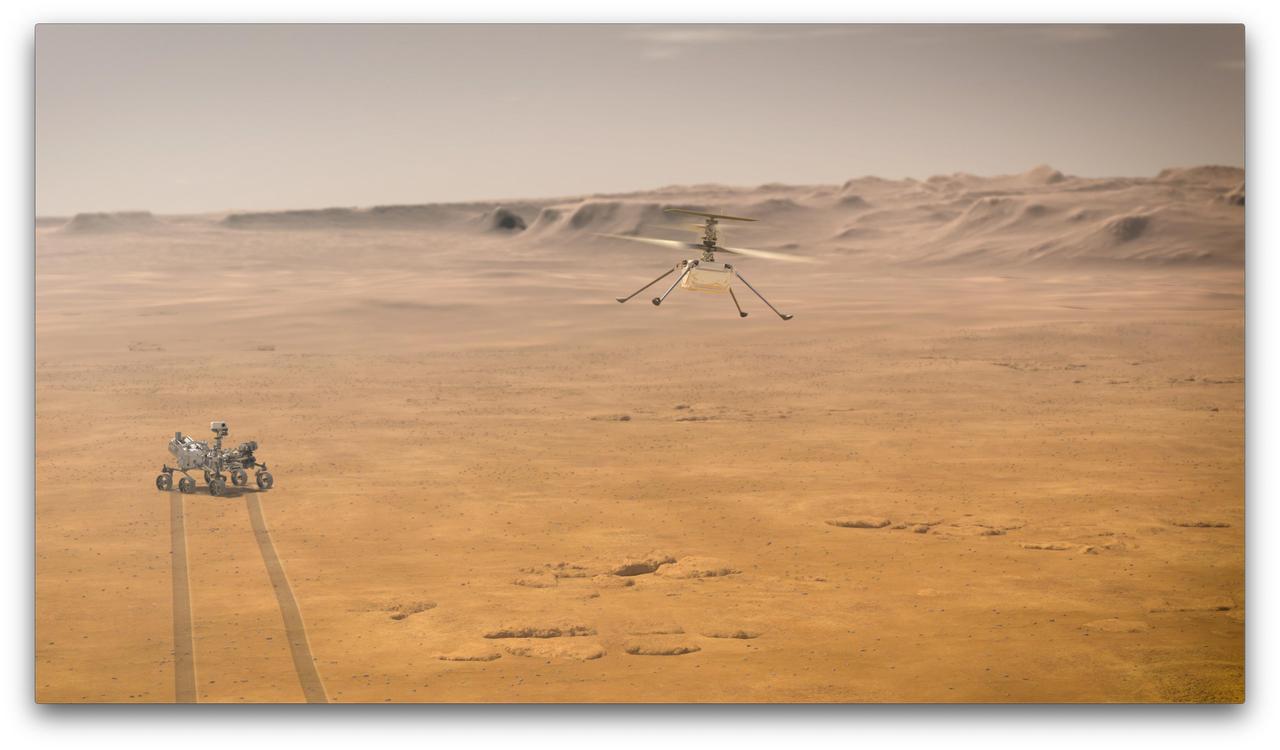
En bref, il décollera, volera le long d'un certain itinéraire et accostera - et tout cela sans intervention humaine, en mode entièrement automatique. Le poids de l'hélicoptère est de 1,8 kg, il est très léger, il sera guidé en vol par deux hélices de 1,2 m de long en fibre de carbone.
Il y aura plusieurs vols, la durée de chacun est de 90 secondes. Le vaisseau spatial est situé à une distance d'environ 10 minutes-lumière de la Terre, il n'y a donc tout simplement aucun moyen de le contrôler, peu importe ce que veulent les ingénieurs. Les trois vols seront effectués au même endroit - le drone atterrira au même point les trois fois. La NASA a environ un mois pour travailler avec le drone, donc si tout se passe bien, elle peut effectuer un autre vol et atterrir, pour la quatrième fois, dans un nouvel endroit. Pour la première fois, le drone décolle et atterrit simplement - c'est simple. Et puis, si tout se passe bien, ils peuvent l'entraîner en cercle, essayer de voler plus haut et effectuer quelques manœuvres plus "exotiques", selon les ingénieurs.
Pourquoi seulement 30 jours? Parce qu'un drone est une preuve de concept de technologie de décollage et d'atterrissage. Même si tout se passe aussi bien que possible, les scientifiques quitteront le rover et prendront le rover - les ressources du projet sont limitées.
Comme mentionné précédemment, la tâche principale du drone est de prouver la possibilité même de voler dans une atmosphère martienne raréfiée (seulement 1% de la densité de la Terre) et l'efficacité de la technologie choisie. Bien sûr, le système a été testé sur Terre, mais les tests sur le terrain étaient toujours la dernière étape. Eh bien, maintenant, le site de test est à 10 minutes-lumière de la Terre, que pouvez-vous faire.

Le vaisseau spatial de Mars par le bas
Si le vaisseau spatial de Mars décolle, il prendra plusieurs photos, qui auront déjà une valeur scientifique - il ne sera pas possible de faire des photos depuis l'orbite de Mars dans cette résolution. La NASA, si tout se passe bien, pourra envoyer un rover déjà grand sur Mars, qui pourra couvrir les distances que le rover parcourt désormais en jours, en quelques minutes.
