Pourquoi ai-je décidé d'écrire ce post?
Bien sûr, vous pouvez voir les instructions d'origine pour l'installation de ROS Noetic sur le Wiki ROS , mais tout est en anglais et est expliqué très vaguement, mais je vais essayer de vous l'expliquer le plus clairement possible. Alors, commençons.
Qu'est-ce que ROS?
ROS - Robot Operating System, un cadre pour la programmation de robots, fournissant des fonctionnalités pour le travail distribué. ROS a été initialement développé en 2007 sous le nom de switchyard au laboratoire d'intelligence artificielle de l'Université de Stanford.
ROS Noetic peut-il être installé sur d'autres versions d'Ubuntu?
Il n'y a pas de réponse correcte à cette question. Il semble que des packages Noetic individuels puissent être installés sur d'autres versions du système d'exploitation, mais leur stabilité n'est pas garantie. Par conséquent, tout ne l'est probablement pas. Alors passons à l'installation elle-même.
Et si j'utilise une version différente d'Ubuntu
ROS a été développé dans différentes versions qui sont installées sur différentes versions d'Ubuntu.
Version Ubuntu |
Version ROS |
Ubuntu 15.04 et 16.04 |
Ros kenetic |
Ubuntu 18.04 |
ROS Mélodique |
Ubuntu 20.04 |
ROS Noetik |
ROS Ubuntu? ! noetic , ros-noetic
, ros-melodic
.
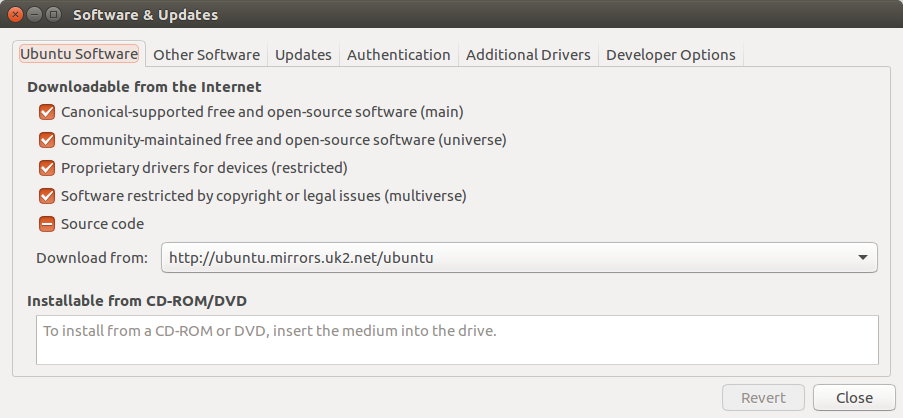
, :
Main - , Canonical.
Universe - , .
Restricted - .
Multiverse - , .
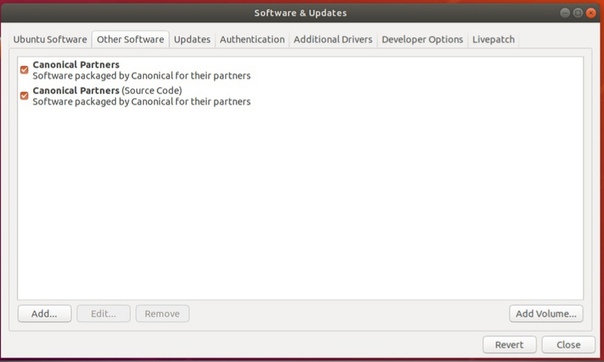
, . " Ubuntu" "Ubuntu Software" ,
"Other sowtware" Canonical Parthners Canonical Parthners(source code)
ROS
ROS Noetic
1
. packages.ros.org . :
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $ (lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
. :
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
curl apt-key, , -:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
2
-
sudo apt-get update
3
. , ROS :
Desktop Full - , . , : 2D/3D . , :
sudo apt install ros-noetic-desktop-full
2. Desktop Instal - ROS, rqt rviz.
sudo apt install ros-noetic-desktop
3. ROS-Base: (Bare Bones) - ROS. , . :
sudo apt install ros-noetic-ros-base
- ROS :
sudo apt install ros-noetic-_
4
bash, ROS. :
source /opt/ros/noetic/setup.bash
5
, ROS. ROS , . , rosinstall - , ROS . :
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6
Avant de pouvoir utiliser de nombreux outils ROS, vous devrez initialiser rosdep . Il vous permet d'installer facilement les dépendances système pour le code source que vous souhaitez compiler et est nécessaire pour exécuter certains des composants principaux de ROS. Si vous n'avez pas encore installé rosdep , il est temps de l'installer. Pour ce faire, écrivez dans le terminal:
sudo apt python3-rosdep
Étape 7
Pour initialiser rosdep, écrivez dans le terminal:
sudo rosdep init
Et puis nous écrivons ce qui suit:
rosdep update
LE TOTAL
Félicitations pour l'installation de ROS Noetic. Vous pouvez maintenant commencer à programmer vos propres robots en utilisant ROS.