À l'occasion du 51e anniversaire du premier atterrissage humain sur la Lune en juillet 1969, rappelons la technologie fondamentale qui a permis cet atterrissage: le filtre de Kalman . Nommé d'après Rudolf Kalman, un ingénieur électrique américain, mathématicien et inventeur d'origine hongroise, le filtre est une technique mathématique qu'il a proposée en 1960. Il est particulièrement utile pour estimer la position d'objets sur la base d'observations avec plusieurs capteurs et est largement utilisé dans les systèmes de guidage, de navigation et de contrôle pour véhicules et aéronefs.
C'est lors de la visite de Kalman au centre de recherche Ames de la NASA à Mountain View que les ingénieurs de la NASA ont vu que les méthodes de Kalman pouvaient résoudre le problème d'estimation de trajectoire non linéaire pour le programme Apollo. Cependant, l'exécution de l'algorithme de filtre de Kalman sur un ordinateur des années 1960 n'était pas possible. Un mémo technique (des archives de la NASA, voir ci-dessous) illustre les travaux de recherche dans les années 1960 et 1970 qui ont implémenté un «filtre de Kalman numériquement précis dans un système informatique à mémoire limitée adapté aux applications en temps réel telles que , pour la navigation à bord d'aéronefs ou d'engins spatiaux. "
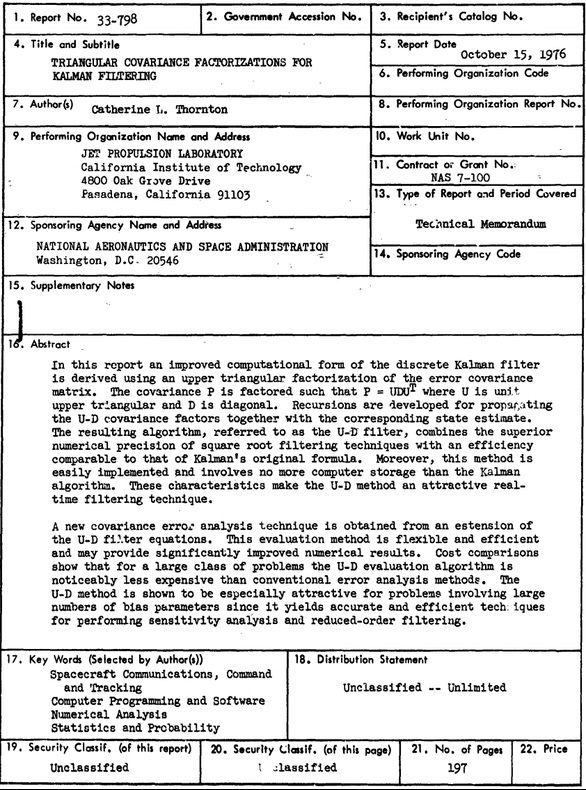
Coefficients de covariance à trois côtés pour le filtre de Kalman (archives de la NASA)
Un autre problème majeur avec le filtre de Kalman il y a 50 ans était le manque de stabilité de calcul dû aux erreurs d'arrondi causées par la contrainte de 8 bits. De nombreuses solutions complexes ont été développées pour résoudre ce problème.
Les efforts de l'équipe d'ingénierie se sont poursuivis et au final, la persévérance a porté ses fruits:
«» 2 , . «» . NASA . , . .
— , «».
Dans une large mesure, ces prouesses techniques ont fait de la mission lunaire un succès. Cinquante ans plus tard, l'algorithme de filtrage de Kalman est utilisé ici sur Terre dans de nombreux domaines, notamment la robotique, les drones et les jeux VR. Des chercheurs de l'Université de Tokyo ont utilisé le filtre Kalman en 2014 pour que Roomba détecte et évite avec succès les personnes. La Réserve fédérale américaine a utilisé le filtre de Kalman pour déterminer les taux d'intérêt neutres à long terme et gérer la politique monétaire.
Sebastian Troon, créateur de la voiture autonome chez Google, enseigne le sujet de l'utilisation du filtre Kalman pour suivre des objets en temps réel afin de créer des voitures autonomes. Autoware a annoncé la sortie d'un set ce mois-cialgorithmes open source, y compris le filtre de Kalman, et cet ensemble se concentre sur le développement d'une implémentation de référence d'un véhicule sans pilote dans le monde réel.
Au cours des décennies de leur existence, un certain nombre de technologies ont évolué ensemble et ont atteint un stade de développement tel que leur combinaison rend la conduite autonome possible, utile et précieuse pour la société. Cependant, afin de passer du prototypage à la mise en œuvre commerciale, les entreprises s'efforceront de standardiser et d'assurer l'interopérabilité entre les composants - matériel et algorithmes. L'interopérabilité des composants favorise la concurrence et la concurrence contribue à améliorer la qualité et à réduire les coûts, rapproche un avenir sans pilote et justifie les milliards de dollars dépensés en recherche et développement dans le domaine des véhicules sans pilote.
Liens
:
@TeslaHackers — Tesla-, Tesla
@AutomotiveRu — ,

: