
(Betaflight 4.1, je ne l'ai pas encore tourné avec de nouveaux paramètres)
Dernier article - Du sol au quadricoptère FPV: Introduction
L'autre jour, j'ai décidé de passer à Betaflight 4.2 et tout le monde autour de moi conseille d'activer le filtrage avec DShot bidirectionnel. Au fait, c'était en 4.1.
Tout d'abord, comprenons un peu ce qu'est le filtrage et pourquoi il est nécessaire.
Par défaut, Betaflight fournit des paramètres de filtrage généraux adaptés à la plupart des modèles. Mais pour obtenir les meilleures performances, le filtrage peut être ajusté différemment, car il peut être excessif ou insuffisant pour un drone endommagé.
Gyroscope MEMS
Chaque quadricoptère a un FC - Flight Controller, qui est essentiellement un cerveau. Ces contrôleurs ont également une puce numérique, souvent appelée gyro-gyroscope. C'est un capteur qui détecte le mouvement. Il contient un petit dispositif électromécanique appelé MEMS (Micro Electro Mechanical System).
Il y a des "bouchons" à résonance mécanique à l'intérieur de cet appareil. Ces bouchons sont situés sur les trois axes (tangage, roulis, lacet) et en mouvement (partie mécanique) créent des fluctuations de tension (partie électrique).
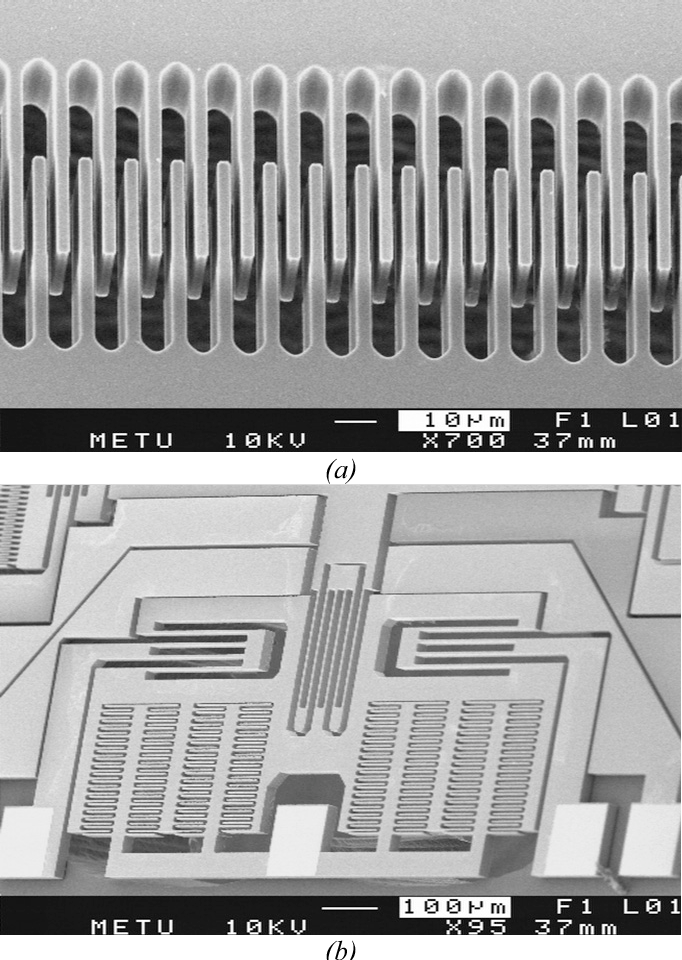
Les fluctuations de tension (fluctuations) sont en fait des ondes analogiques qui sont converties en informations numériques pour être traitées par le contrôleur de vol. Quand on dit gyroscope 8k, cela signifie que 8000 fois par seconde, le signal analogique est converti en numérique et traité par le contrôleur, le firmware, dans ce cas Betaflight.
Bruit
Le bruit est un terme que l'on entend beaucoup, mais qu'est-ce que c'est? En règle générale, nous imaginons immédiatement un bruit sonore ou un environnement bruyant dans la prochaine fourmilière de 23 étages.
Le gyroscope et le contrôleur PID sont confrontés à un problème similaire. Étant donné que le gyroscope est situé sur le contrôleur de vol, qui est attaché au cadre, il subit du bruit. Le bruit peut provenir: des moteurs, des hélices, de la vitesse du vent, du bruit général du châssis, de l'électronique, etc.
Contrôleur PID
Le contrôleur PID est un système qui ajuste la position du quadricoptère en fonction des bâtons (votre contrôle) ou d'une position donnée (enfin, quelle qu'elle soit). Le PID est réglé en utilisant 3 paramètres - P, I et D. Malheureusement, dans cet article, nous ne considérerons pas le réglage PID en détail. Si vous êtes pilote, vous le savez déjà, et si vous êtes débutant, il y aura un article séparé sur ce sujet.
Ce système fonctionne bien lorsque la quantité de bruit est minimale, sinon nous pouvons être confrontés à des problèmes tels que l'oscillation (vibration) ou la surchauffe des moteurs.
Le terme d dans un contrôleur PID est particulièrement lié au bruit. D adoucit les mouvements rapides, mais le calcul de D dans le contrôleur PID augmente considérablement le bruit dans le signal. Cela signifie que le bruit du gyroscope est considérablement amplifié par la valeur du terme D et que nous filtrons donc à deux endroits - le gyroscope et D.À
titre d'exemple d'une telle augmentation, je vais vous montrer les journaux suivants:
Premier graphique - gyroscope
Deuxième graphique - PID
Troisième - moteurs
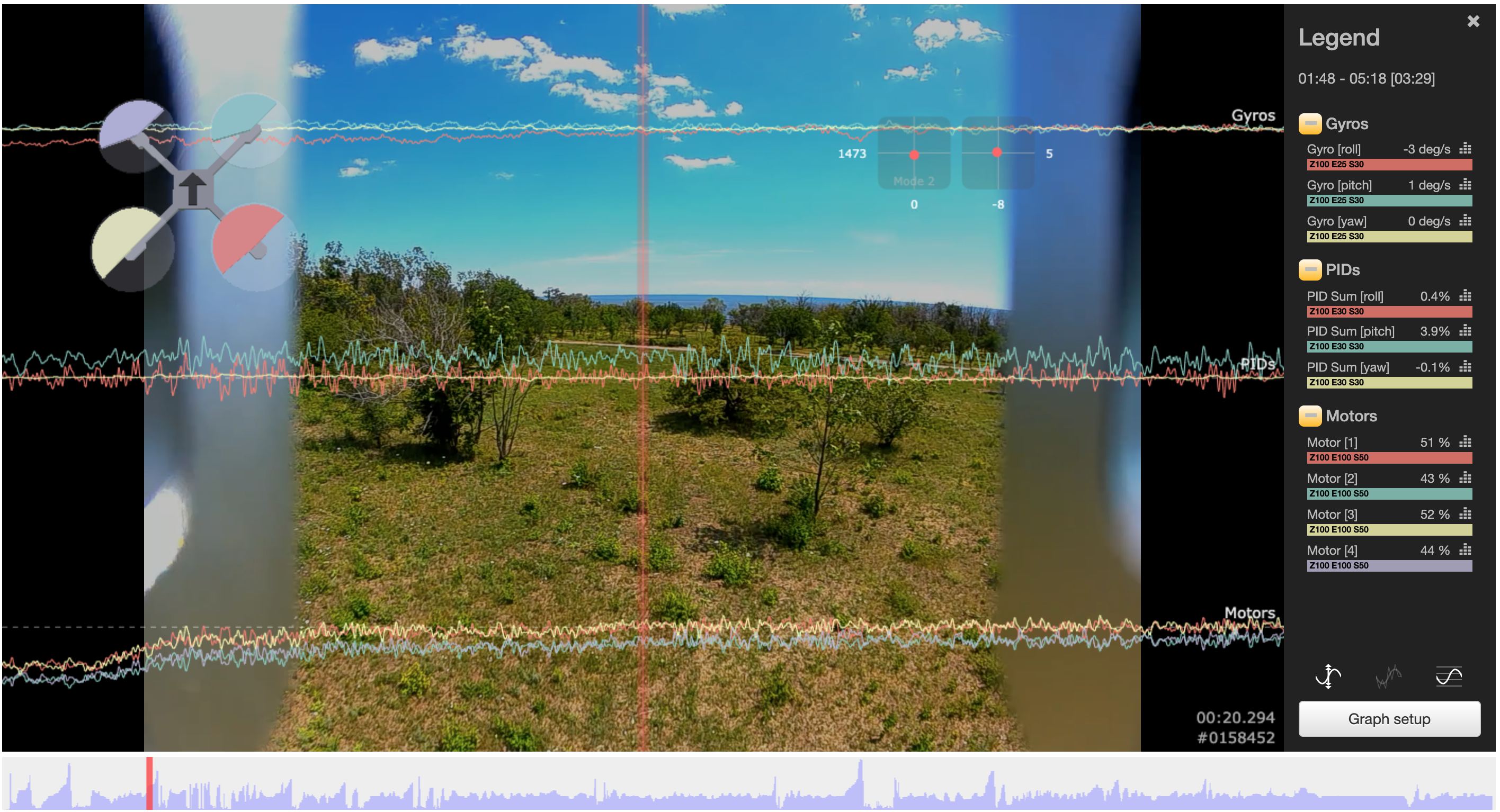
(ce sont des hélices normales , avec un filtrage légèrement réduit)
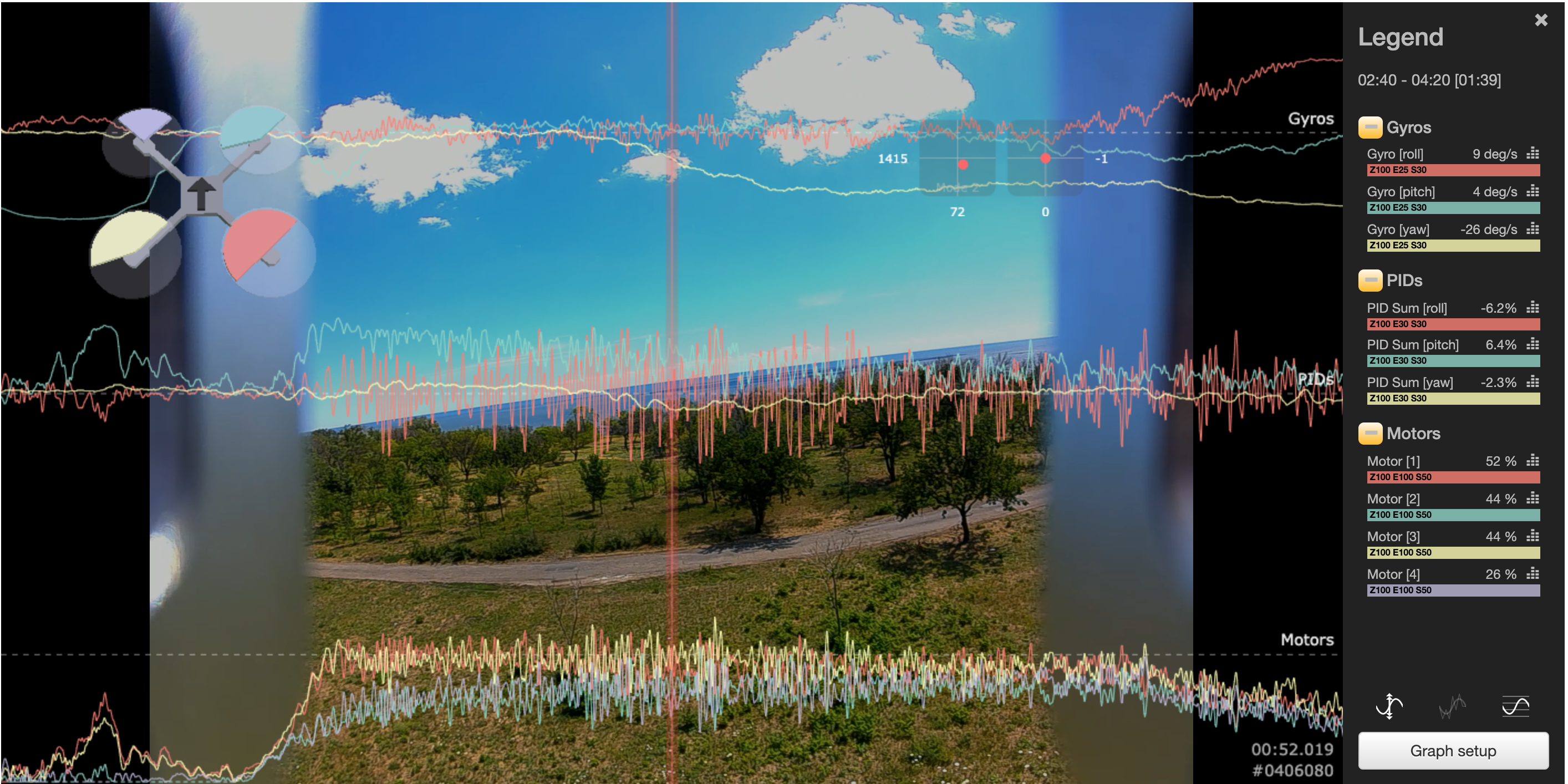
(Comme vous pouvez le voir, les vibrations des mauvaises hélices sont amplifiées au niveau du contrôleur PID, ce qui entraîne une contrainte excessive sur les moteurs, ce sont littéralement des saucisses)
Captures d'écran de - Blackbox Explorer .
Filtration
Le processus de filtrage consiste à éliminer l'excès de bruit du signal du gyroscope. Mais quelle part du signal du gyroscope voulons-nous conserver et quelle quantité filtrer?
Honnêtement, je ne peux pas vous le dire en couleurs, mais il se trouve qu'en vol bêta, le bruit, ou plutôt les vibrations, sont mesurés en Hz. 1Hz - une rotation par seconde. Ceci est fait pour faciliter la visualisation et travailler avec ces variables. En outre, la turbulence est techniquement appelée «taux de changement de rotation» - la fréquence de changement de rotation.
La vitesse du quadricoptère est de l'ordre de 0-30 Hz. Au-dessus de 30 Hz à 80 Hz, nous avons un propwash, lorsque le quadricoptère secoue à cause de la turbulence dans ses propres flux. Les informations comprises entre 0 et 80 Hz sont importantes pour le contrôleur PID, nous n'y toucherons donc pas.
Avec PIDtoolbox vous pouvez piocher ces cartes:

Passe-bas
Filtres

Comme le montre le graphique précédent, le signal du gyroscope contient des informations de 0 Hz à 1000 Hz, mais nous ne nous intéressons qu'à la plage 0-80 Hz, car il s'agit du mouvement réel du quadricoptère que le contrôleur PID devrait connaître. Nous avons donc besoin d'une solution de filtrage pour permettre aux basses fréquences de passer à travers le contrôleur PID tout en atténuant les hautes fréquences, et pour cela nous pouvons utiliser un filtre passe-bas.
Les filtres passe-bas permettent au signal basse fréquence de passer à travers et d' atténuer les hautes fréquences, qui ne sont pour la plupart que du bruit.
La fréquence de coupure est réglée et le contrôleur réduit simplement les signaux au-dessus de cette fréquence. Courbe d' atténuationpermet de ne pas tout couper sous un propre, et plus la fréquence du bruit est élevée, plus son atténuation se produit, en douceur.
Les pilotes font souvent l'erreur de régler un tel filtre à la même fréquence que le bruit visible. Par exemple à 200Hz. Étant donné que le filtre atténue le bruit en douceur, l'installation d'un tel filtre ne donnera pas beaucoup de résultats. Le filtre doit être réglé sur des fréquences plus basses. Peut-être même à 80 Hz.
Plus vous installez un tel filtre bas, plus le filtrage est important.
Il y a une chose simple à garder à l'esprit lors de la configuration du filtrage. Plus il y a de filtrage, plus le délai est important. Il est clair qu'il est en millisecondes et non significatif, mais pour un contrôleur PID, il est critique. Puisqu'il commencera à réagir aux événements plus tard, ce qui signifie qu'il essaiera d'aligner le quadcopter dans le passé :)
Filtre coupe-bande
Notch se traduit par une encoche, en fait, cela ressemble à ceci: Les
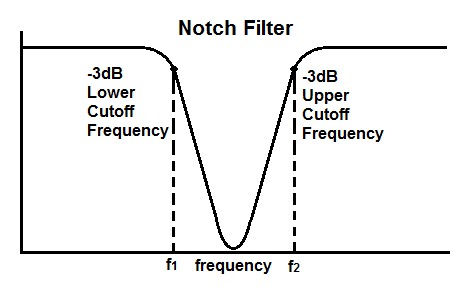
filtres rejettent une partie du bruit en dessous et une partie du bruit au-dessus . Depuis Betaflight 3.1, ces filtres sont dynamiques et s'adaptent à différents niveaux de bruit.
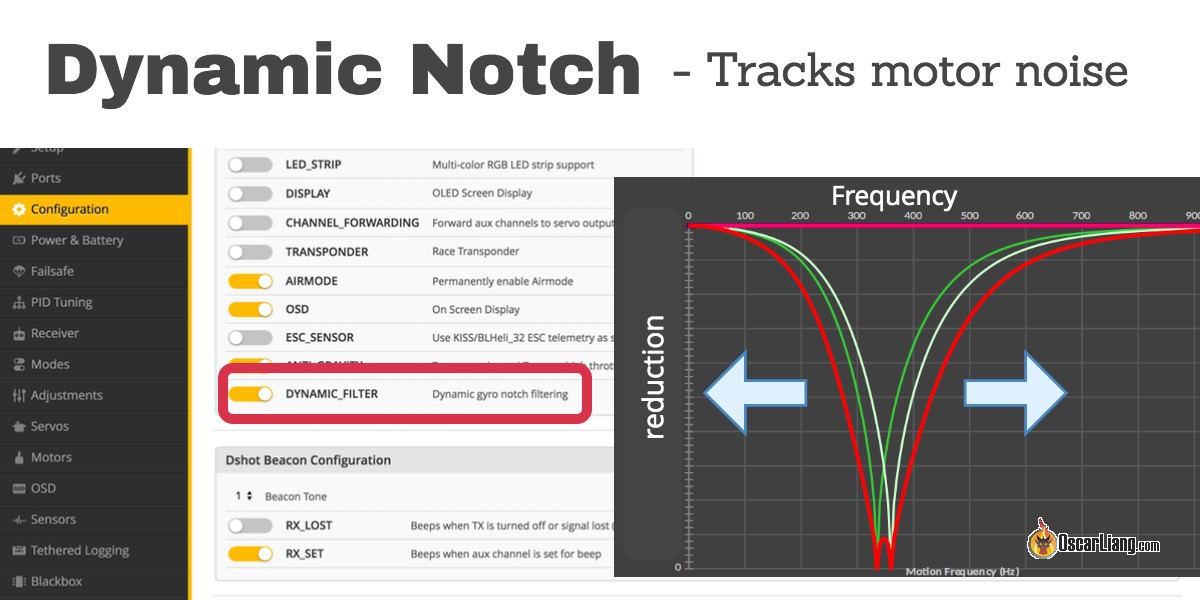
Les filtres sont utilisés en conjonction avec les filtres passe-bas, mais ils sont déjà utilisés pour filtrer le bruit des moteurs situés au-dessus.
Filtrage des termes D
Comme mentionné ci-dessus, D est capable de multiplier le bruit du gyroscope, donc Betaflight a un filtrage D. Ci-dessous sur les frettes, vous pouvez voir le niveau de bruit avant et après le filtrage.
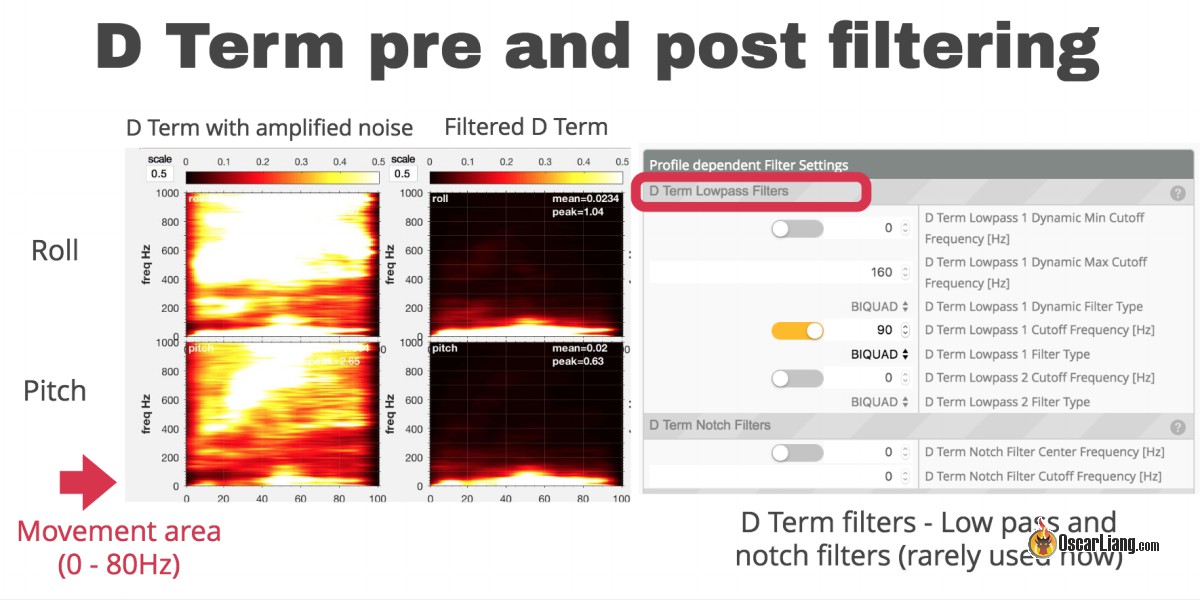
La communauté ne comprend pas clairement s'il faut filtrer fortement D ou non. Mais il existe une règle des moteurs chauds, moins il y a de filtration et plus D est élevé, plus ils chauffent et peuvent même brûler. Mais dans la direction opposée, on obtient un retard.
Filtre RPM
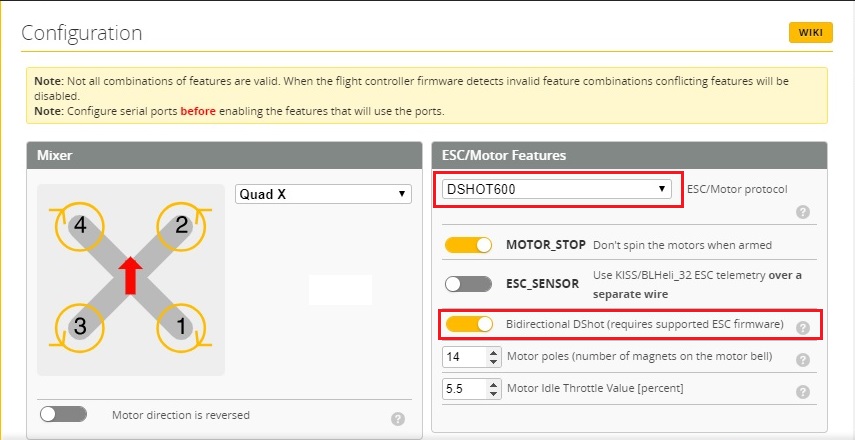
Donc, en fait, ce que j'ai commencé à utiliser de nouveau, c'est le filtrage RPM. Il fonctionne grâce à un protocole DSHOT bidirectionnel qui permet au contrôleur de vol de connaître le régime exact d'un moteur particulier. Et sur la base de ces données, un filtrage est appliqué.
(Votre ESC doit prendre en charge DHSOT double face)
Micrologiciel pour ESC, à partir de 3,7
Si les moteurs sont chauds, cela pose un problème. Les moteurs chauds peuvent être un signe que les moteurs reçoivent beaucoup de bruit et essaient de répondre aux vibrations si souvent que de la chaleur est générée.
Les moteurs peuvent chauffer pour un certain nombre de raisons, telles qu'un vieux châssis, des cloches tordues sur les moteurs, un équilibre déséquilibré, des bombes supplémentaires sur votre drone.
Bien sûr, il vaut mieux avoir, comme on dit, une construction propre, et que tout serait nouveau, mais vous pouvez d'abord essayer de configurer le filtrage.
Pour commencer, vous pouvez commencer par augmenter le filtrage D, par pas de 20 Hz. Vérifiez la température après chacune de ces étapes et trouvez votre plage optimale.
Et vous devriez le rechercher entre la température des moteurs et les vibrations. Comme mentionné ci-dessus, bien que le filtrage soit conçu pour réduire la quantité de bruit, il peut imposer des retards et le contrôleur PID peut ne pas suivre. Et aussi drôle que cela soit, provoquer des vibrations. Mais ces vibrations n'appartiennent pas au propwash. Il s'agit simplement d'une opération PID inefficace.
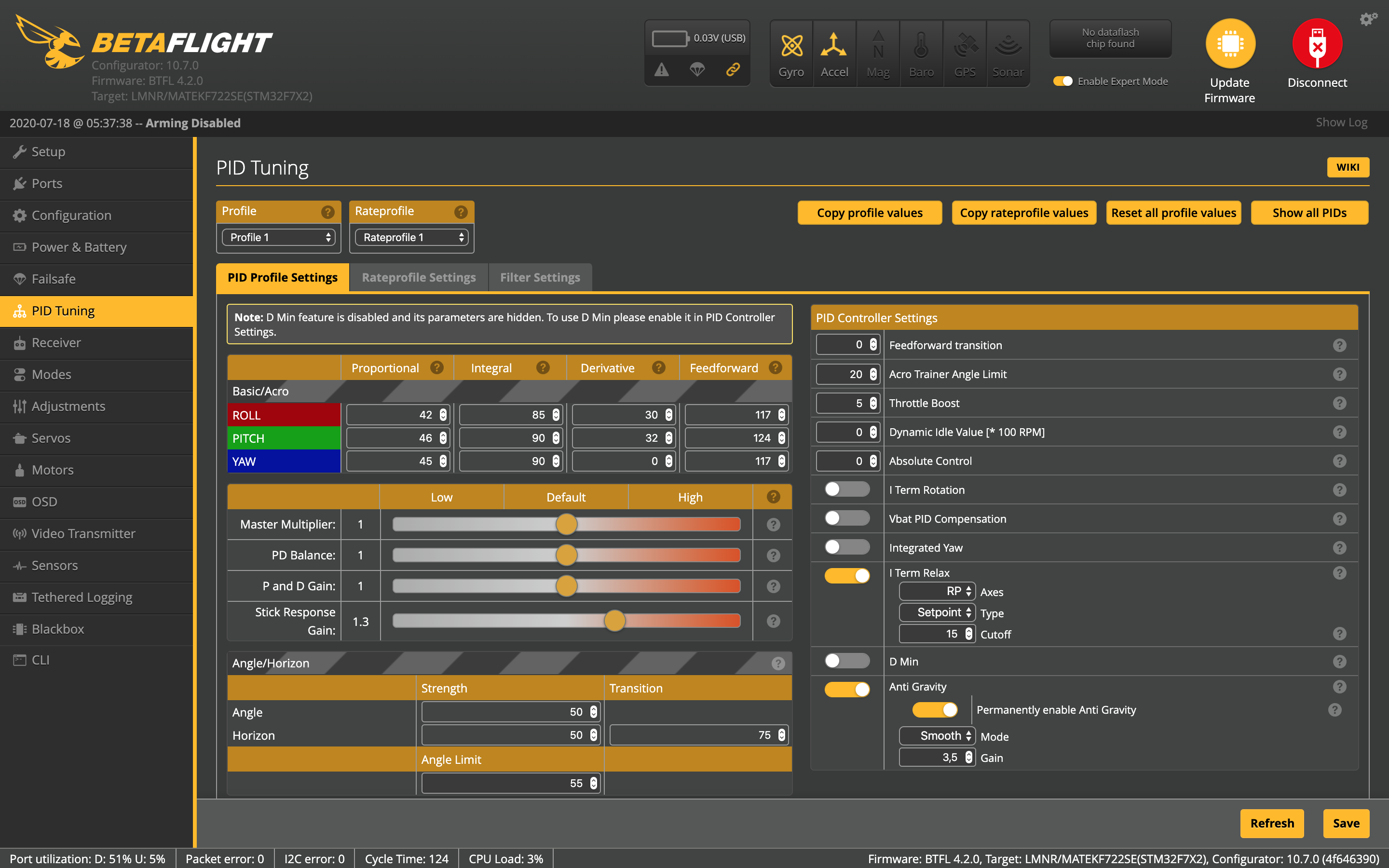
Les versions récentes de Betaflight ont des curseurs, essayez de ne pas changer les valeurs des filtres eux-mêmes, mais essayez d'utiliser ces curseurs "maîtres".
Pour le moment, j'ai de tels paramètres avec le filtre RPM activé, je vais peut-être essayer de réduire encore plus le filtrage:
