Les processeurs neuromorphes, construits sur le principe de l'interaction des neurones, montrent les meilleurs résultats dans le domaine des réseaux de neurones artificiels / tâches de vision industrielle. Cependant, ils sont loin d'imiter les processus qui se produisent dans le cerveau. L'une des nombreuses raisons est les astrocytes, les cellules gliales les plus abondantes.
On pensait qu'elles avaient une fonction de soutien pour les neurones, mais les recherches des dernières décennies montrent que ce type de cellule fait bien plus que remplir l'espace entre les neurones, comme le pensent les chercheurs depuis plus d'un siècle. La recherche montre que ces cellules jouent également un rôle clé dans les fonctions cérébrales, y compris l'apprentissage et la génération de modèles centraux (CPG), qui sont à la base des comportements rythmiques tels que la respiration et la marche.
Contre des solutions neuromophiles existantes
L'hypothèse selon laquelle l'apprentissage se produit uniquement avec des connexions solides entre les neurones est incorrecte. En fait, l'apprentissage et la mémoire sont équilibrés de manière optimale dans des réseaux qui
fonctionnent macroscopiquement au bord du chaos , mode dynamique étroit
largement ignoré dans les algorithmes d'apprentissage, mais également manifesté par le cerveau.
Pour la plupart, les solutions neuromorphes manquent de la combinaison de l'efficacité de calcul de l'objectif global du réseau avec la polyvalence du mécanisme local, dépendant de l'activité.
Réseau neuro-astrocytaire
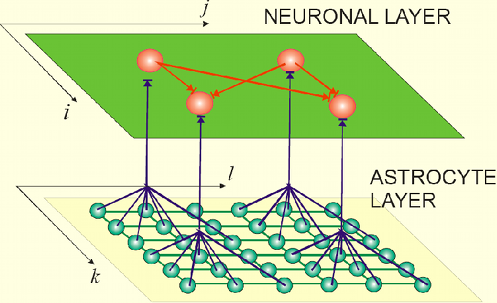
Reconnaissant cette lacune dans la littérature existante, les chercheurs de l'Université Rutgers développent des algorithmes cérébraux qui prennent également en compte et reproduisent la fonction des astrocytes.
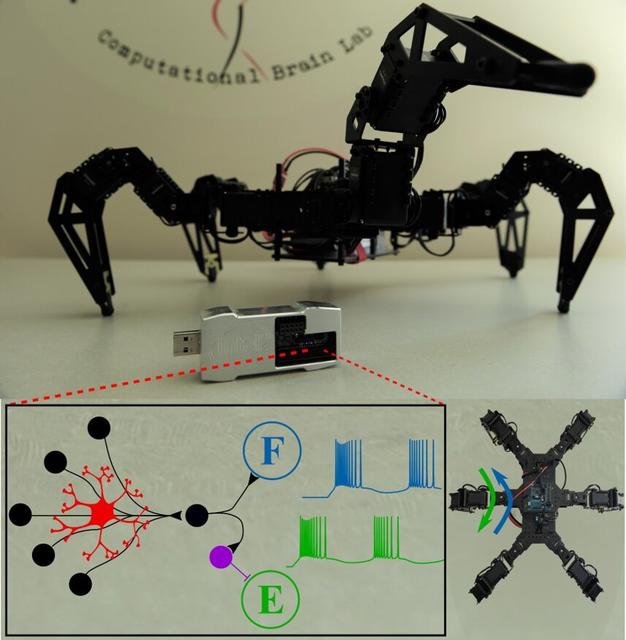
Ils proposent (attention, tautologie) un contrôleur CPG cerveau-morphique basé sur un réseau neuro-astrocytaire complet qui génère deux schémas de marche pour un robot. Basés sur des mécanismes de neuromodulation astrocytaire nouvellement identifiés, ils nous proposent une architecture CPG qui s'intègre de manière transparente dans la puce neuromorphique Intel Loihi en utilisant un environnement d'interaction en temps réel entre la puce et l'environnement du système d'exploitation robotique (ROS).
Le Loihi CPG peut être utilisé pour contrôler un robot marcheur avec une résistance au bruit sensoriel et des profils de vitesse variables.
Il est incroyablement intéressant d'observer le développement de nouvelles approches architecturales dans le domaine de l'imitation du travail du cerveau. Des recherches et des expériences sont en cours qui changeront considérablement nos vies à l'avenir. Et nos emplois.