Depuis 2017, je fais différentes visions informatiques: des détections claires et des classifications à la lecture labiale .
Et après une série d'accidents, je me retrouve le seul ingénieur en vision par ordinateur dans une startup qui fabrique des hélicoptères sans pilote. Pour cette raison, je décide de rompre avec mes jambes de vision par ordinateur et de faire un projet animalier lié aux drones.
Le plan est le suivant: je vais simplement assembler un quadric avec une caméra, un pilote automatique et un morceau de fer de bord (neurones d'entraînement et autres CV), et j'obtiendrai plus ou moins une plate-forme volante universelle. Par exemple, comme celui-ci , mais plus flexible et moins cher. Et il existe de nombreuses applications intéressantes: de la détection et du suivi d'une personne au contrôle d'un quadricoptère à l' aide de l'apprentissage par renforcement .
C'est ainsi que mon voyage de 8 mois a commencé: de l'idée et de la commande des premiers composants sur aliexpress à l'utilisation complète de l'odométrie visuelle embarquée par le quadricoptère et en volant le long de celui-ci.
Dans la première partie de l'article (après quelques paragraphes!), Je vais raconter et montrer quels composants j'ai utilisé pour assembler un quadricoptère pour cette tâche, ce qui m'a guidé lors du choix et ce qu'il faut prendre en compte pour le faire voler.
( !) , , GPS, visual SLAM.
,
450 ( 450).

. : . - . , tradeoff \.
,

-, . , , ¯\_(ツ)_/¯
( AliExpress) . 700KV (← ; , KV ). KV.
,
( ), , , , ( ).
: , , 10 . 10, , , , .
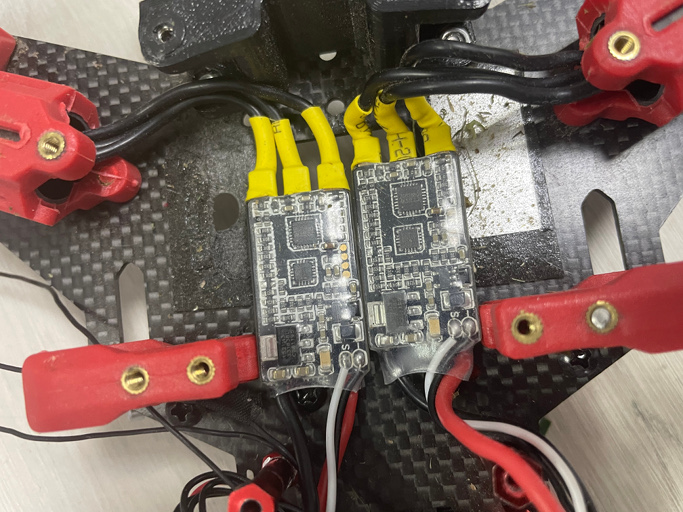
ESC. DShotXXX ( XXX, )
, software , ESC ( ArduPilot PX4, )
,
( — XXYY): ( ). . ? . .

, , : - .
, . 1145.
, . , , . - , - :)
( ): 1) ( ) 2) .
,

( "") .
: . , , . 4S Li-Po , 5000 mAh. . , ( ) 20 .
,

(\) . .. . , . ( ) FrSky (Taranis X10 lite FrSky R-XSR). , , \.
"" RadioMaster. , FrSky , .
,
software stack (state estimation, , ), hardware ( software stack ).
Hardware , ( IMU, , ).

( + GPS, , ), , .
- . .. - . open-source , ( ): ArduPilot PX4.
ardupilot ( , ) 2020- hardware - pixhawk 4 mini.
, companion computer

, . companion computer , , - path planning, external navigation, + task specific .
: Intel Movidius, Google Coral, Jetson . Raspberry c .. , "" .
Jetson-e Nano ( ) (TensorRT), GPU .. - CUDA ( CUDA, , ?), SLAM .
,
Intel RealSense D435, , RGB . Raspberry Pi c MIPI .. 3D , - , .
, , , rolling shutter .. , .
, !
, (, ) !
, , :
Getting Started. . , .
, companion computer . , .
, , . , , ( , ESC).
, .
, ( ⇒ ).
Loctite ( ), ( , ). - .
( ), , .
( GPS), .
. : , . LiPo 4.2v. , "" , ( 3.5-3.6v)
, ?
, : .
- . (), .
Le résultat est un drone sur lequel il est très ennuyeux de voler en mode manuel, et s'il vole, alors seulement dans la rue, il est grand pour une utilisation en intérieur. Mais DimDrone constituera une excellente plate-forme pour tester et rechercher différents algorithmes de vision par ordinateur.